1. 远征 A3-Ultra 概述
1. 远征 A3-Ultra 概述
Section titled “1. 远征 A3-Ultra 概述”1.1 部件说明
Section titled “1.1 部件说明”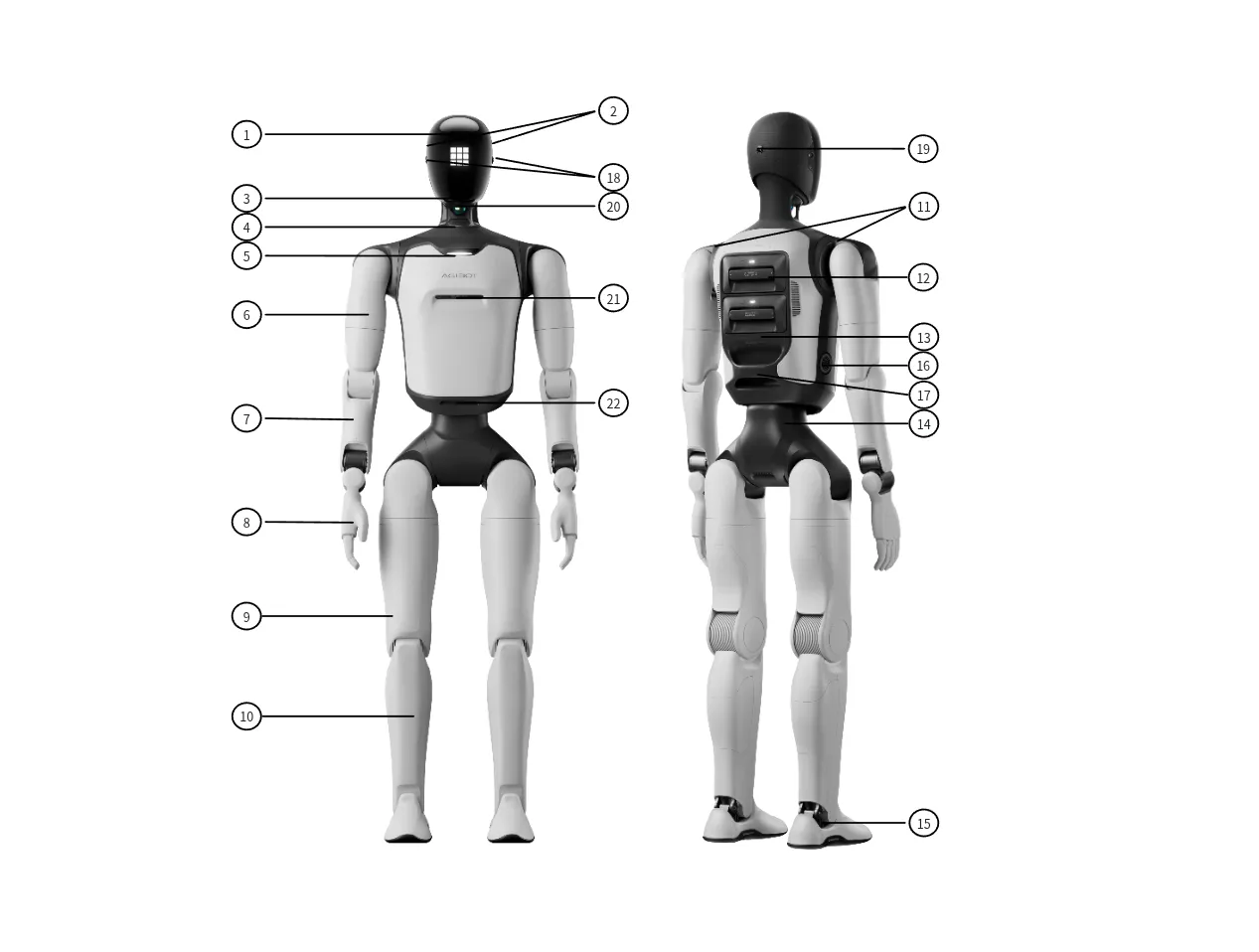
| 序号 | 名称 | 序号 | 名称 | 序号 | 名称 |
|---|---|---|---|---|---|
| 1 | 头部显示屏 | 9 | 大腿 | 17 | 腰部把手 |
| 2 | 左右扬声器 | 10 | 小腿 | 18 | 左右鱼眼相机 |
| 3 | 交互双目相机 | 11 | 双肩触摸传感器 | 19 | 后视鱼眼相机 |
| 4 | 开关 | 12 | 双电池仓 | 20 | 激光雷达 |
| 5 | 麦克风 | 13 | 维修仓 | 21 | 胸部RGBD相机 |
| 6 | 大臂 | 14 | 腰 | 22 | 胯部RGBD相机 |
| 7 | 小臂 | 15 | 足 | ||
| 8 | 灵巧手 | 16 | 充电口 |
1.2机器人规格参数
Section titled “1.2机器人规格参数”| 机器人型号 | 远征A3 Ultra | |
|---|---|---|
| 整机 | 身高 | 1.74m |
| 尺寸 | 174cm(H)52cm(W)30cm(L) | |
| 重量 | 60KG | |
| 主动自由度 | 51 | |
| 颈部自由度 | 2 | |
| 单手臂自由度 | 7 | |
| 腰部自由度 | 3 | |
| 单腿自由度 | 6 | |
| 灵巧手自由度 | 10(可选,最高支持20自由度) | |
| 感知系统 | 3D激光雷达 | 具备 |
| 具身操作RGB-D相机 | 具备 | |
| 地形感知RGB-D相机 | 具备 | |
| 交互RGB相机 | RGB双目摄像头 | |
| 环视RGB相机 | 具备 | |
| GPS | 具备 | |
| GPS RTK | 具备 | |
| UWB定位 | 具备 | |
| 肩部触摸传感器 | 具备 | |
| 通讯 | 通讯方式 | WiFi、4G/5G网络、蓝牙 |
| 交互 | 麦克风 | 全向拾音麦克风 *前后阵列8*麦克风 |
| 扬声器 | 具备 | |
| 交互屏 | 曲面屏 | |
| 指示灯 | 全向指示灯 | |
| 性能 | 膝关节峰值扭矩 | 320N·m |
| 移动速度 | 日常行走最大速度:1.8m/s 日常行走速度<1.2m/s 实验室最大速度:2.5m/s 跑步最高5m/s | |
| 单臂负载 | 5kg | |
| 能源与动力 | 电池容量 | 1152W·h |
| 续航时间 | 综合续航8h ※实际续航视使用情况而定、会受行走速度及负载影响,站立 / 行走时长 1:1 | |
| 充能方式 | 支持直充、换电、自主充电 | |
| 充电时间 | 小于等于2h | |
| 充电输入电压 | 110V-220V | |
| 算力 | 基础算力板 | RK3588*2 |
| 高阶算力板 | NVIDIA Thor | |
| 其他 | 手持无线终端 | 具备 |
| 智能OTA升级 | 具备 | |
| 二次开发 | 支持 |
1.3机器人关节运动空间
Section titled “1.3机器人关节运动空间”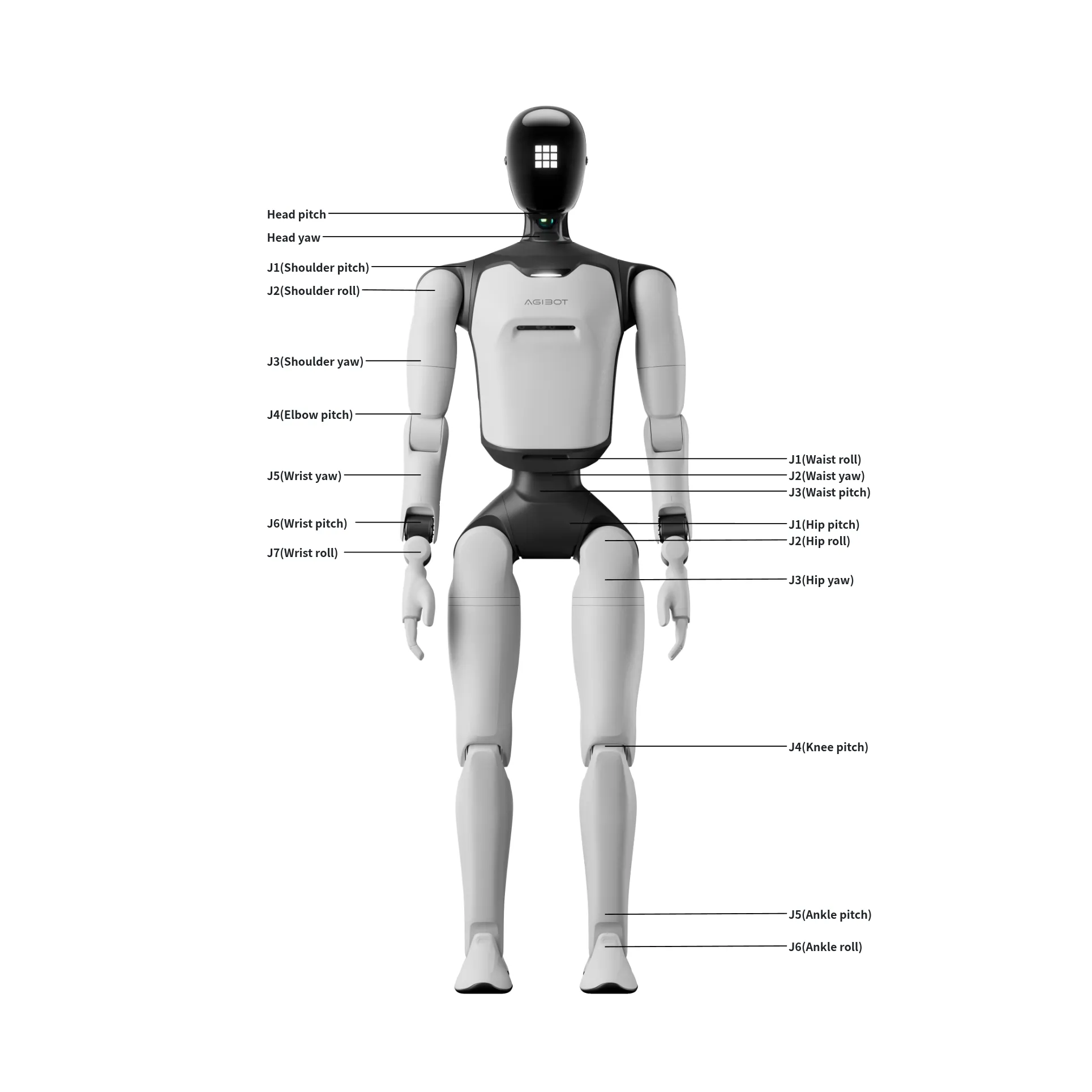
| 关节名称 | 关节限位情况 | 关节名称 | 关节限位情况 |
|---|---|---|---|
| 手臂 | J1(Shoulder pitch): -170°~170° | 腰部 | J1(Waist roll):±20° |
| J2(Shoulder roll): -91°~91° | J2(Waist yaw): ±150° | ||
| J3(Shoulder yaw): ±160° | J3(Waist pitch): ±30° | ||
| J4(Elbow pitch):-60°~140° | 腿部 | J1(Hip pitch): -168°~154° | |
| J5(Wrist yaw): ±160° | J2(Hip roll): -60~100° | ||
| J6(Wrist pitch): ±93° | J3(Hip yaw): ±158° | ||
| J7(Wrist roll): ±33° | J4(Knee pitch): -10°~148° | ||
| 头部 | 俯仰关节(Head pitch): 15°(俯)、25°(仰) | J5(Ankle pitch): -52°~30° | |
| 旋转关节(Head yaw): ±90° | J6(Ankle roll): ±20° |
1.4机器人相机视角
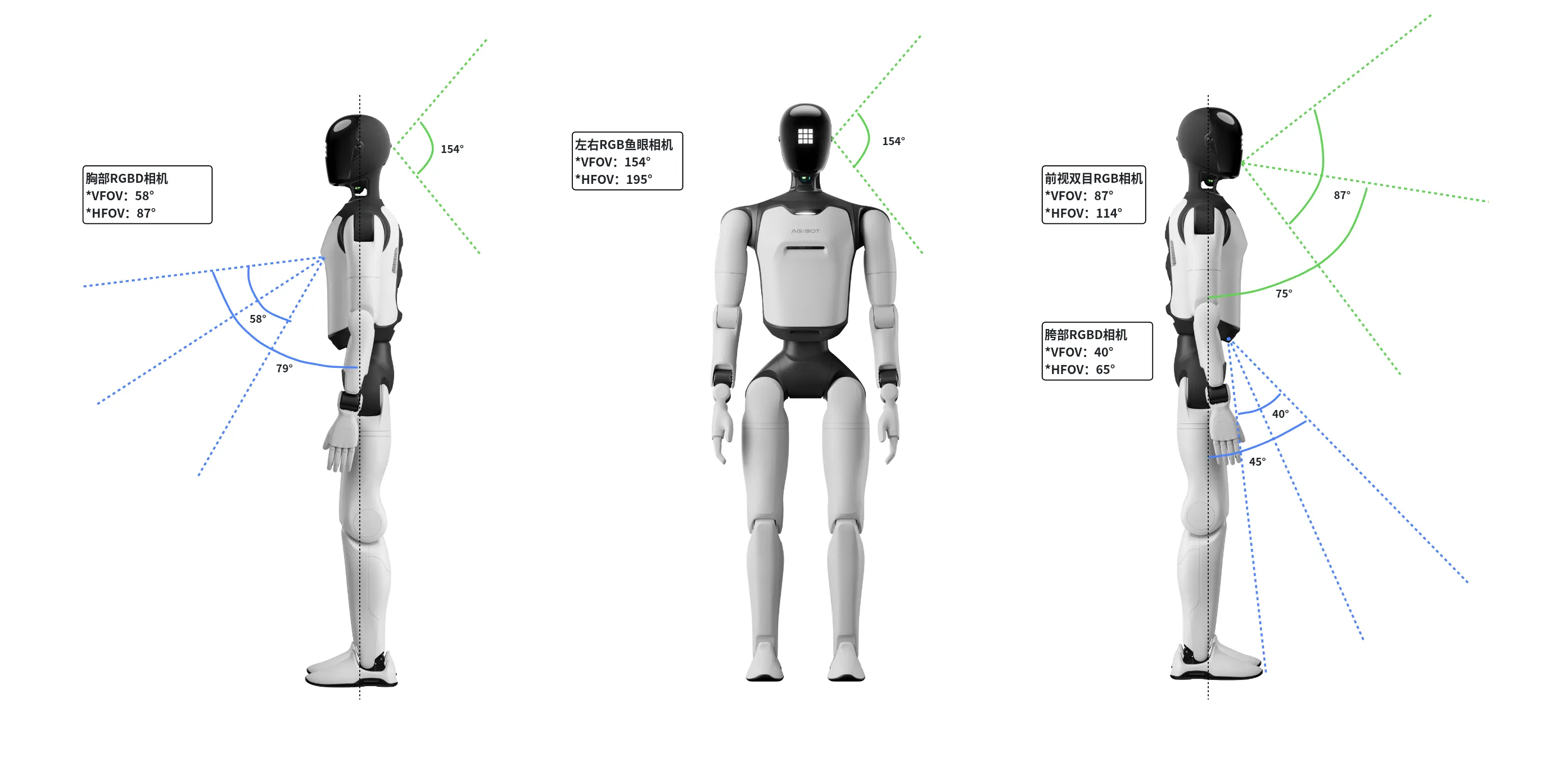
Section titled “1.4机器人相机视角”| 机器人型号 | 感知配置 | 感知能力 |
|---|---|---|
| 远征A3 Ultra | 交互双目相机 | 支持人机交互场景下的视觉识别与响应 |
| 左右鱼眼相机 | 环视环境感知,物体识别及避障 | |
| 后视鱼眼相机 | ||
| 胸部RGBD相机 | 作业区域深度和图像感知 | |
| 胯部RGBD相机 | 地面区域深度和图像感知 |
1.5网络拓扑
Section titled “1.5网络拓扑”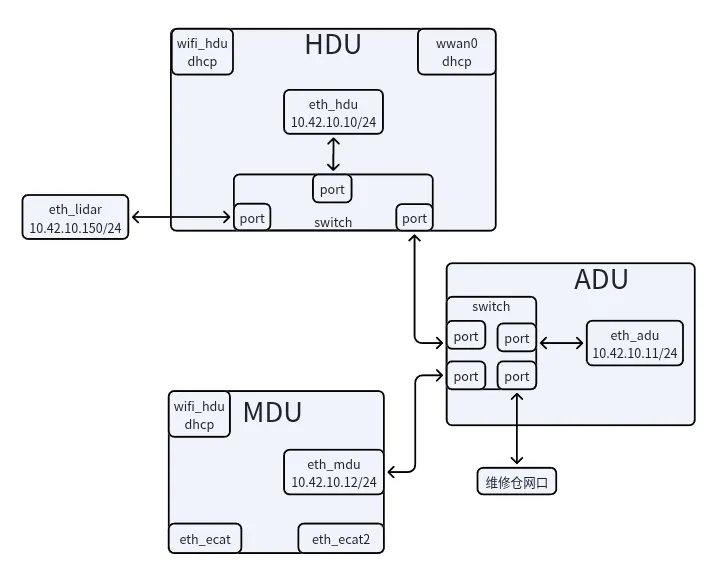
HDU 通过 WiFi 连外网,通过 eth_hdu(10.42.10.x)与 MDU和ADU 构成机器人内部核心网络,5G作为备用链路,在无wifi环境下可通过5G连接外部网络。
注意:机器人调试仓内网口暂未启用,为无效网口。type-A仅供debug测试使用,type-C接口供遥控器充电使用,不允许接插其他设备。
1.6工控机规格参数
Section titled “1.6工控机规格参数”机器人系统由三大核心计算单元构成:
MDU(Motion Domain Unit):基于 RK3588 工控平台,集成了实时性能更好的SoC,为运控算法模块提供稳定算力,同时也是离机器人执行器最近的硬件单元。
HDU(Head Domain Unit):基于 RK3588S2 平台,内部集成了算力SoC,网络外设,GPS以及丰富的传感器接口,为头部相关的软件及算法模块提供智能化交互控制计算能力。
ADU(AGI Domain Unit):基于 NVIDIA Thor 平台,集成高算力SoC,少量的外设,丰富的传感器接口,主要为具身智能算法模块提供充足的算力。
RK3588系列规格参数可以查阅 瑞芯微官网,NVIDIA Thor 平台规格参数可以查阅 NVIDIA 官方。
下表展示了三大核心计算单元的硬件参数:
| 工控机 | 硬件类型 | 规格参数 |
|---|---|---|
| MDU | CPU | 8核 ARM big.LITTLE(4×A76 + 4×A55),最高 2.3GHz,带 L3 缓存 |
| 内存 | 16GB | |
| 磁盘容量 | 256GB | |
| HDU | CPU | 8核 ARM big.LITTLE 架构(4×A76 + 4×A55),最高 2.3GHz |
| 内存 | 16GB | |
| 磁盘容量 | 128GB | |
| ADU | CPU | 12核 ARM(单集群),最高 2.6GHz,12MB L2 缓存,支持 SVE2 |
| 内存 | 64GB | |
| 磁盘容量 | 358 GB |