1. 远征 A3 概述
1. 远征 A3 概述
Section titled “1. 远征 A3 概述”1.1 部件说明
Section titled “1.1 部件说明”

1.2 机器人规格参数
Section titled “1.2 机器人规格参数”| 一级分类 | 二级分类 | 条目 | 具体内容 |
|---|---|---|---|
| 产品基础信息 | 身高 | 173cm | |
| 尺寸 | 173(H)*52(W)*30(L)cm | ||
| 净重 | ≈55kg | ||
| 主动自由度 | 颈部2dof、双臂7*2dof、双腿6*2dof、腰部3dof、灵巧手(自由选配:灵动款2026(4*2dof)、专业款2026(13*2dof))6*2dof | ||
| 产品特性 | 电气性能 | 充电电压 | 110V-220V |
| 电池容量 | 1152Wh | ||
| 充电时间 | 小于等于2H | ||
| 续航时间 | 10H | ||
| 环境适应性 | 工作温湿度 | 环境气温-10°C ~ 45℃范围内,相对湿度10% ~ 90%,无结露 | |
| 存储温湿度 | -20℃ ~ 70℃,相对湿度10% ~ 90%,无结露 | ||
| IP等级 | 关节模组:IP5X | ||
| 场地适应性 | 最小通过宽度 | 600mm(侧身)、900mm(正面) | |
| 最大越障高度 | 25cm | ||
| 最大运行坡度 | 可以在15°坡全向移动,并能以任意方位在15°驻坡 | ||
| 产品能力 | 感知能力 | 环境感知 | 头部双目相机 |
| 导航能力 | 定位精度 | ±10cm , ±10° | |
| 导航避障 | 支持实时自主导航避障 | ||
| 移动能力 | 最大移动速度 | 1.2m/s | |
| 移动模式 | 支持前进、左转、右转 | ||
| 物联能力 | 通讯能力 | WiFi、蓝牙、4G/5G移动网络 | |
| 手臂典型参数 | 单臂最大负载 | 5kg | |
| 末端线速度 | 带载速度1m/s,空载速度3m/s | ||
| 手臂活动空间 | J1(Shoulder pitch): ±170° | ||
| J2(Shoulder roll):±91° | |||
| J3(Shoulder yaw): ±160° | |||
| J4(Elbow pitch): -60°~140° | |||
| J5(Wrist roll): ±33° | |||
| J6(Wrist pitch): ±93° | |||
| J7(Wrist yaw): ±160° | |||
| 腿部典型参数 | 腿部活动空间(存在一定偏差) | J1(Hip roll):-60~100° | |
| J2(Hip yaw): ±158° | |||
| J3(Hip pitch): -168°~154° | |||
| J4(Knee pitch): -10°~140° | |||
| J5(Ankle pitch): -52°~30° | |||
| J6(Ankle roll): ±20° | |||
| 头部典型参数 | 头部活动空间 | 俯仰关节: -15°~30° | |
| 旋转关节: ±90° | |||
| 腰部典型参数 | 腰部活动空间 | J1(Waist roll):±20° | |
| J2(Waist yaw): ±150° | |||
| J3(Waist pitch): ±30° |
1.3 传感器及工控机规格参数
Section titled “1.3 传感器及工控机规格参数”机器人系统由两大核心计算单元构成:
MDU(Main Data Unit)主数据单元:基于 RK3588 工控平台,负责高性能计算与多设备扩展。
HDU(Human-machine Data Unit)人机交互单元:基于 RK3588S2 平台,主要承担人机交互与轻量计算任务。
RK3588系列规格参数可以查阅 瑞芯微官网,以下表格为工控机和传感器基本硬件参数:
| 工控机 | 硬件类型 | 规格参数 |
|---|---|---|
| MDU | CPU | 8核 ARM big.LITTLE(4×A76 + 4×A55),最高 2.3GHz,带 L3 缓存 |
| 内存 | 16GB | |
| 磁盘容量 | 256GB | |
| HDU | CPU | 8核 ARM big.LITTLE 架构(4×A76 + 4×A55),最高 2.3GHz |
| 内存 | 16GB | |
| 磁盘容量 | 128GB | |
| 双目相机 | 分辨率:1920*1536 帧率:30fps 数据格式:yuv422、mjpeg |
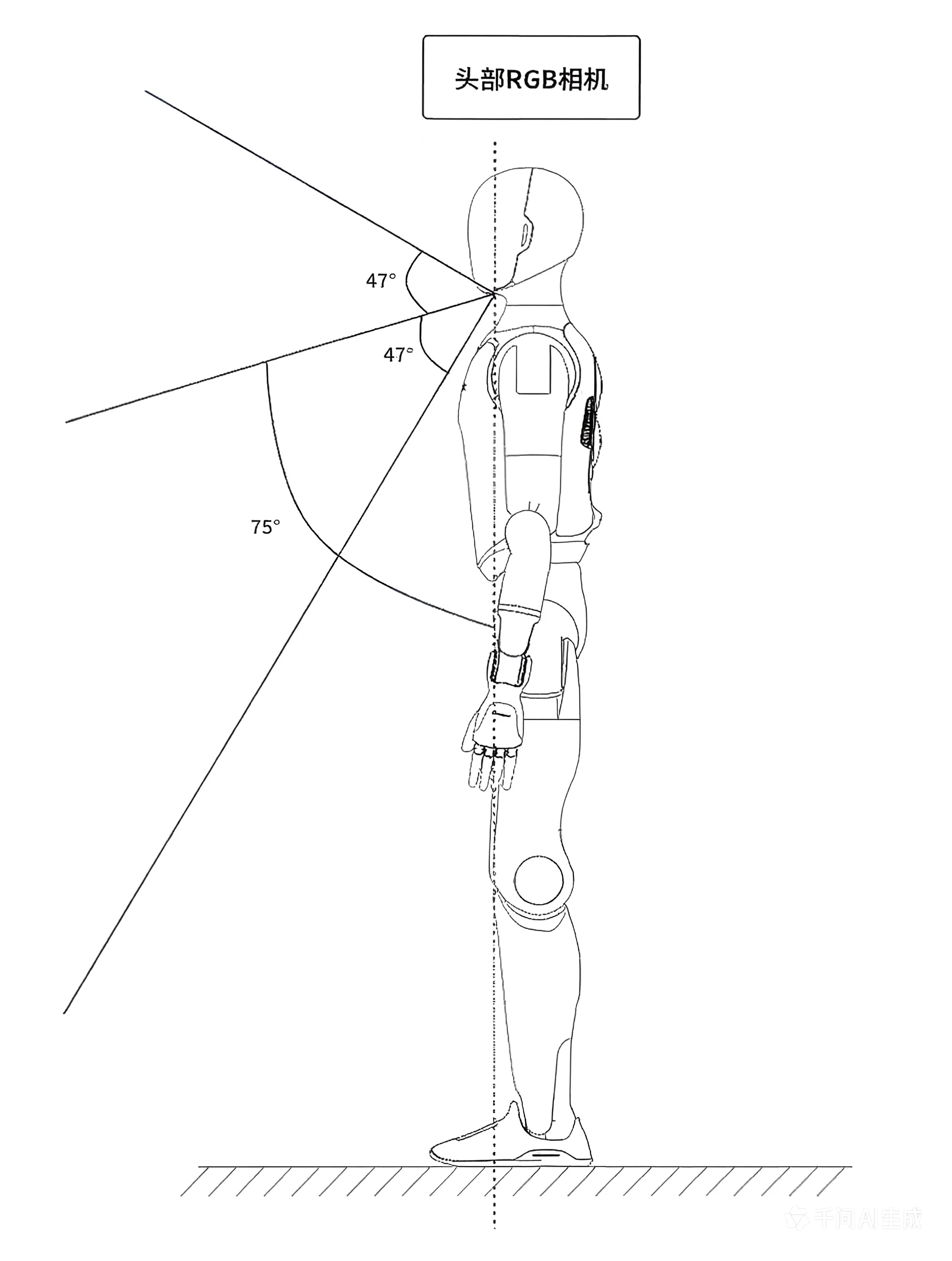
1.4 相机视场角
Section titled “1.4 相机视场角”远征A3头部搭载交互双目相机,支持人机交互场景下的视觉识别与响应,具体视场角如下:
1.5 网络拓扑
Section titled “1.5 网络拓扑”软件网络拓扑图:
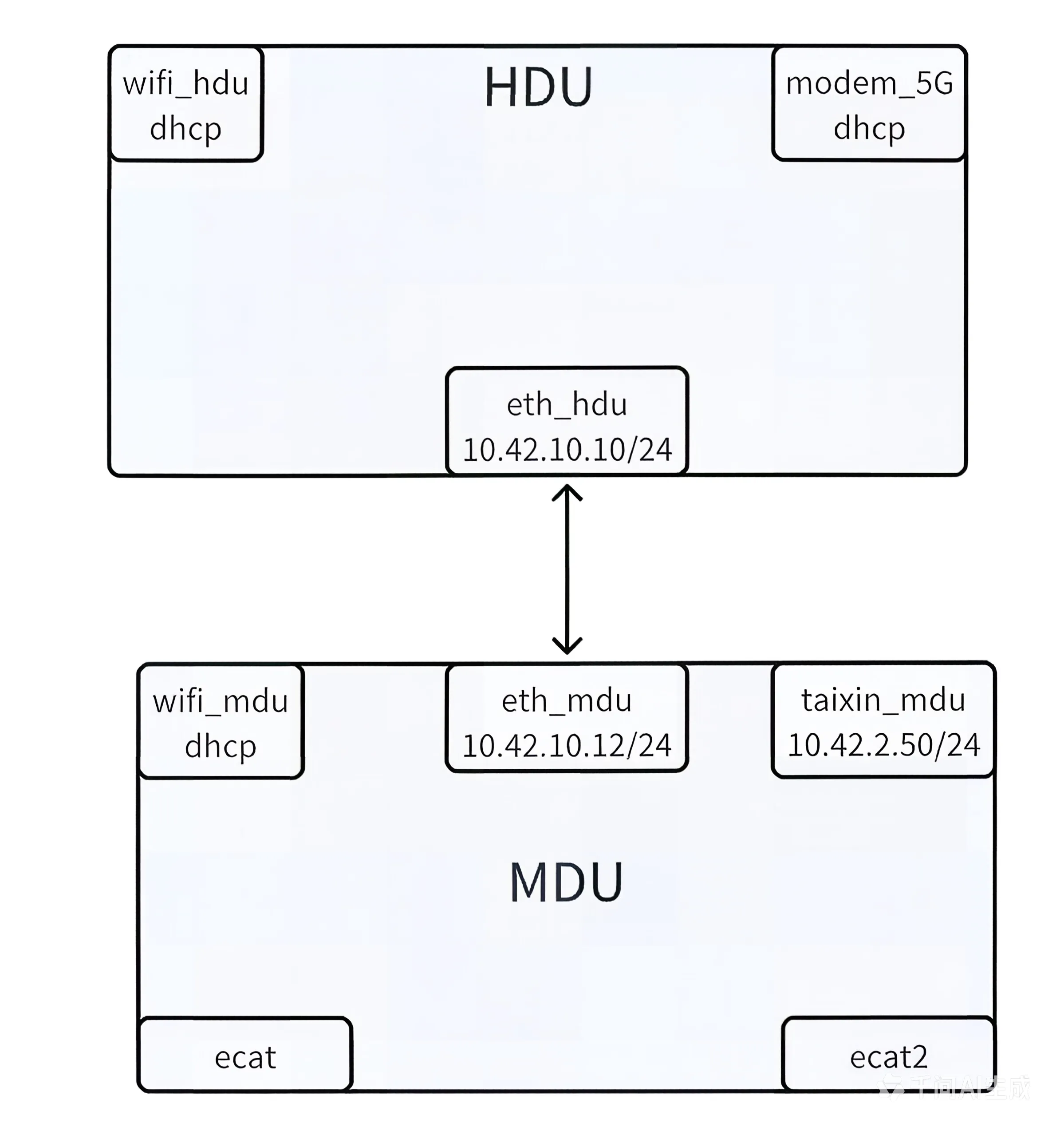
HDU 通过 WiFi 连外网,通过 eth_hdu(10.42.10.x)与 MDU 构成机器人内部核心网络,5G作为备用链路,在无wifi环境下可通过5G连接外部网络。
注意:机器人调试仓内网口暂未启用,为无效网口。type-A仅供debug测试使用,type-C接口供遥控器充电使用,不允许接插其他设备。