1. A2 青春款概述
1. A2 青春款概述
Section titled “1. A2 青春款概述”1.1 部件说明
Section titled “1.1 部件说明”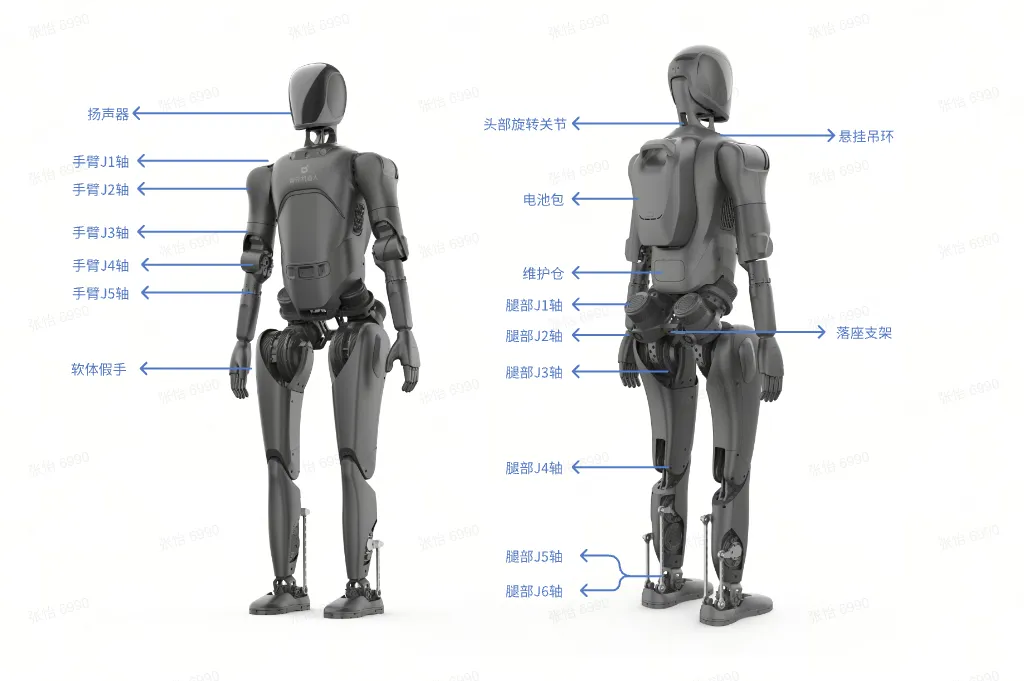
1.2 网络拓扑
Section titled “1.2 网络拓扑”A2 青春款有两种不同硬件机型,供应商有所不同,所以网络拓扑也有所不同,这里 称之为 T3 款和 P1 款。
实机可以通过 ip a 指令查看网卡名称来确定为哪一款。
1.2.1 T3 款
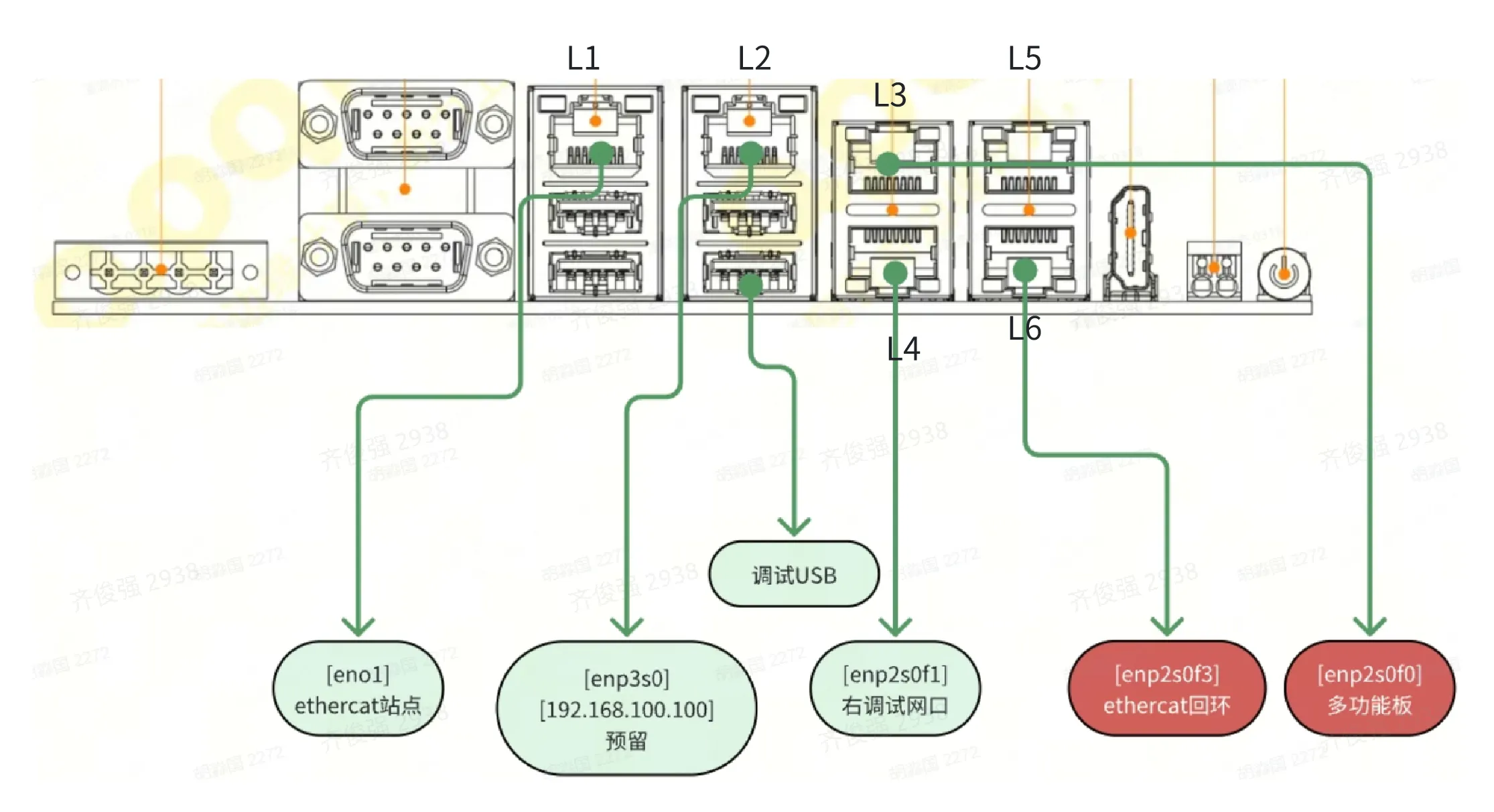
Section titled “1.2.1 T3 款”硬件架构框图
软件网络拓扑图
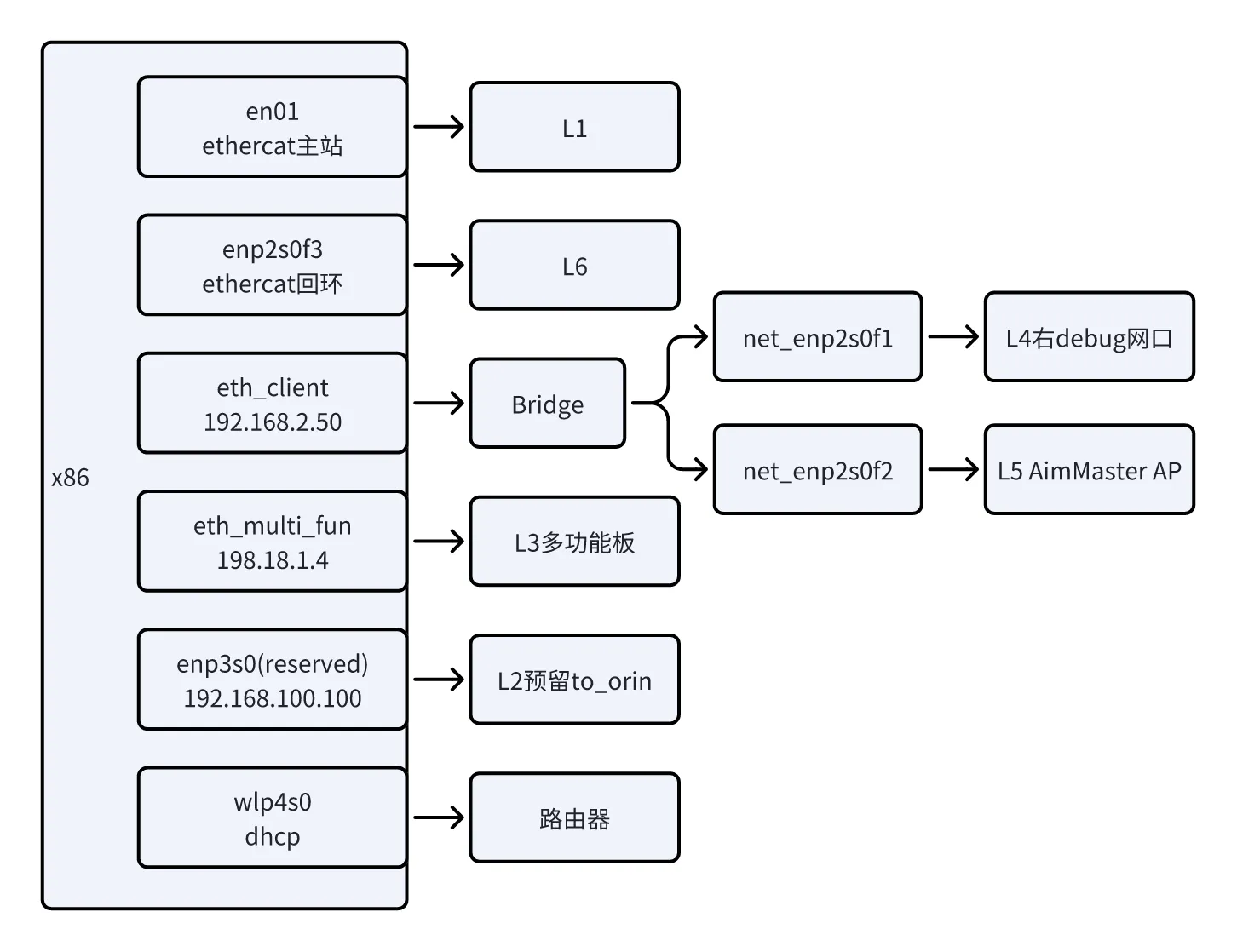
其中
- 右 debug 网口即为机器人背后的调试网口,固定 ip 为 192.168.2.50。
- enp3s0 为预留加装算力平台的网口,推荐在加装算力平台时连接使用。
1.2.2 P1 款
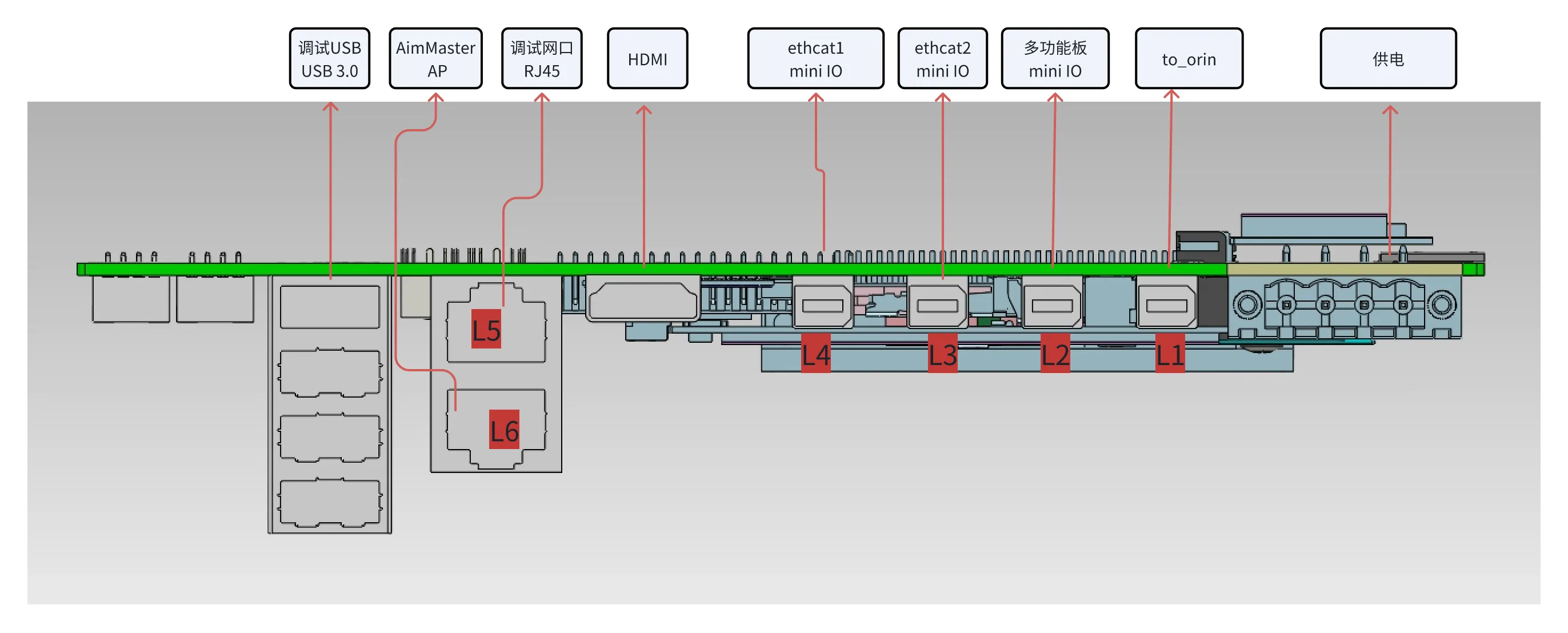
Section titled “1.2.2 P1 款”硬件架构框图
软件网络拓扑图
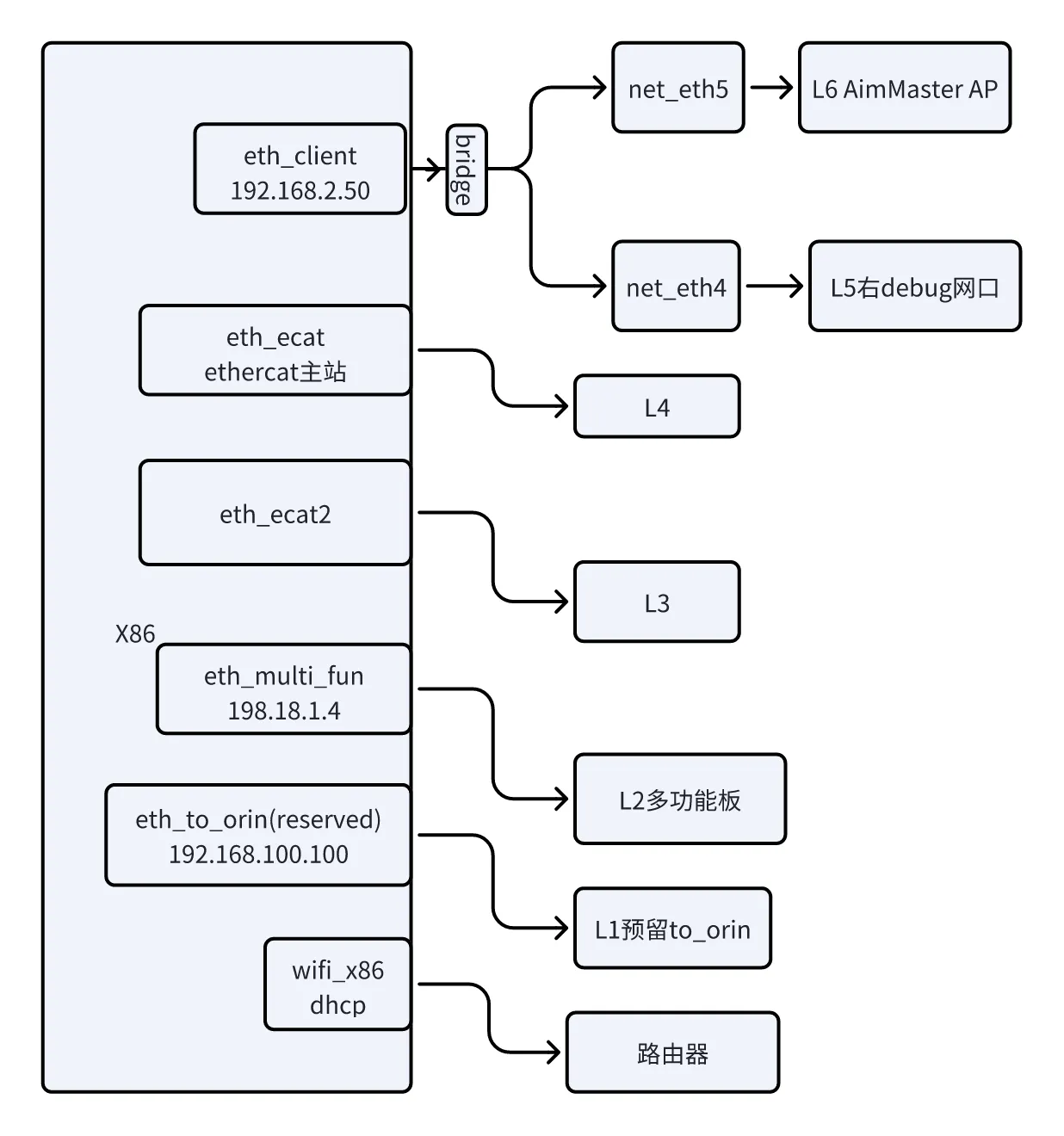
其中
- 右 debug 网口即为机器人背后的调试网口,固定 ip 为 192.168.2.50。
- eth_to_orin 为预留加装算力平台的网口,推荐在加装算力平台时连接使用。
1.3 机器人规格参数
Section titled “1.3 机器人规格参数”| 一级分类 | 二级分类 | 条目 | 具体内容 |
|---|---|---|---|
| 产品基础信息 | 身高 | 169cm | |
| 尺寸 | 169(H)*75(W)*30(L)cm | ||
| 净重 | ≈63kg | ||
| 主动自由度 | 双臂5*2dof、双腿6*2dof、头部1dof | ||
| 产品特性 | 电气性能 | 续航 | 整机力控站立续航时间为:4h35min整机行走续航时间:1h35min |
| 电池容量 | 14.4Ah | ||
| 充电时间 | 2h | ||
| 充电功率 | ≤500W | ||
| 充电输入电压 | 110V-220V | ||
| 充电器输出 | 54.6V 8A | ||
| 环境适应性 | 工作温湿度 | 0~ 40℃,相对湿度10% ~ 90%,无结露 | |
| 存储温湿度 | -20℃~ 70℃,相对湿度10% ~ 90%,无结露 | ||
| IP等级 | 关节模组:IP5X | ||
| 场地适应性 | 最小通过宽度 | 目前本体遥控通过最小宽度>1m,导航通过最小宽度>2m | |
| 最大越障高度 | 20mm | ||
| 最大运行坡度 | 8%(角度4.57度) | ||
| 操作与交互 | 感知能力 | 不支持 | |
| 语音能力 | 不支持 | ||
| 轻作业能力 | 不支持 | ||
| 遥控操作 | 无线遥控器 | ||
| 扬声器 | 5W | ||
| 舞蹈开发 | 支持 | ||
| 群控软件 | 支持 | ||
| 移动能力 | 最大移动速度 | 最大速度0.8m/s,日常使用≤0.6m/s | |
| 移动模式 | 支持平移、斜移、原地转向 | ||
| 物联能力 | 通讯协议 | TCP/IP | |
| 通讯模块 | Wifi | ||
| 智控参数 | 基础算力板 | 16核高性能CPU | |
| 手臂典型参数 | 灵巧手 | 软体假手 | |
| 单臂额定负载 | 1.5kg(不含末端执行器) | ||
| 末端线速度 | 1m/s | ||
| 手臂活动空间 | J1(Shoulder pitch): ±170° | ||
| J2(Shoulder roll): -30°~95° | |||
| J3(Shoulder yaw): ±170° | |||
| J4(Elbow pitch): -1°~118° | |||
| J5(Wrist roll): ±170° | |||
| 腿部典型参数 | 腿部活动空间(存在一定偏差) | J1(Hip roll):-37~40° | |
| J2(Hip yaw): ±75° | |||
| J3(Hip pitch): -50°~110° | |||
| J4(Knee pitch): -5°~140° | |||
| J5(Ankle pitch): -30°~52° | |||
| J6(Ankle roll): ±28° | |||
| 头部典型参数 | 头部活动空间 | 旋转关节: ±45° |
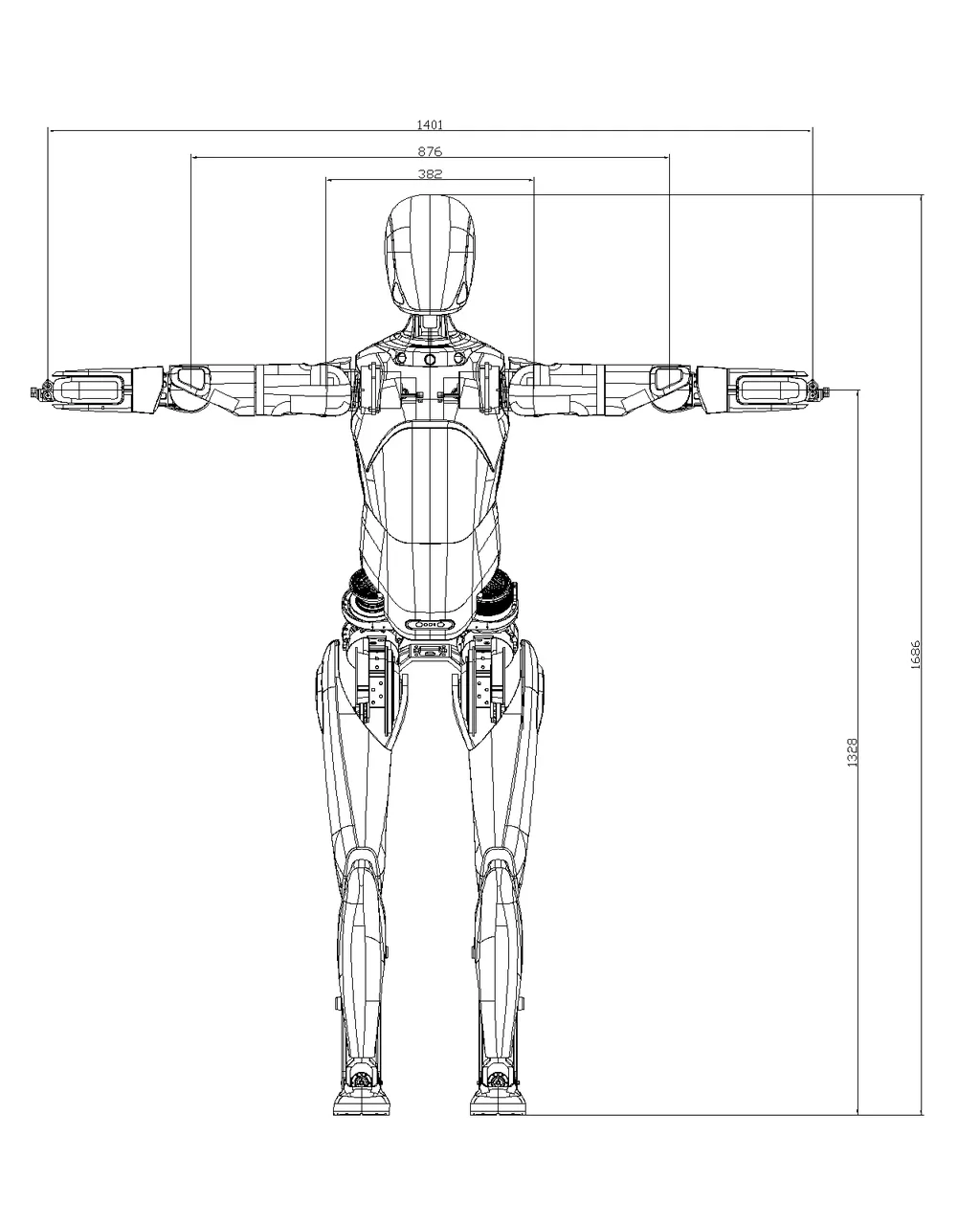
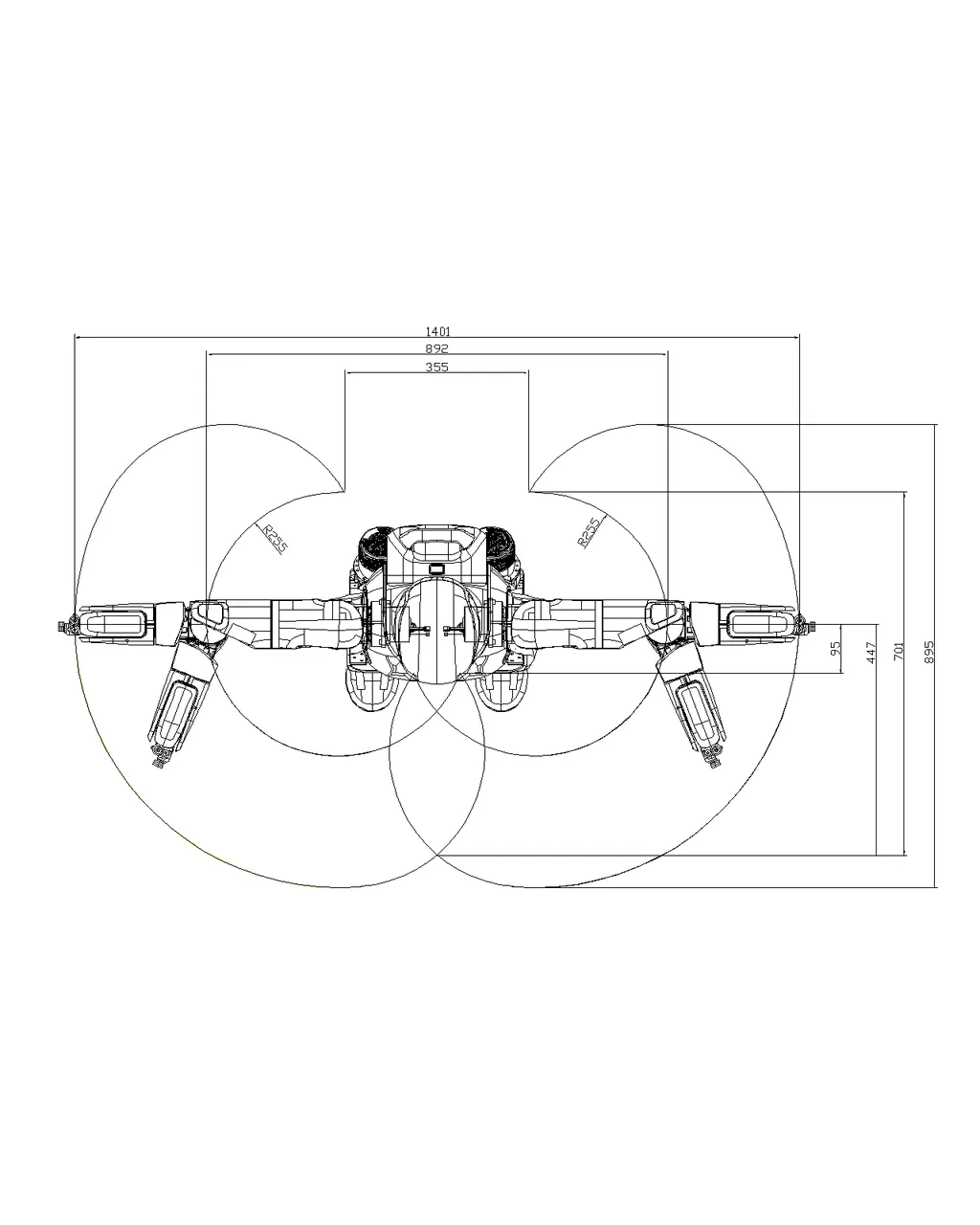
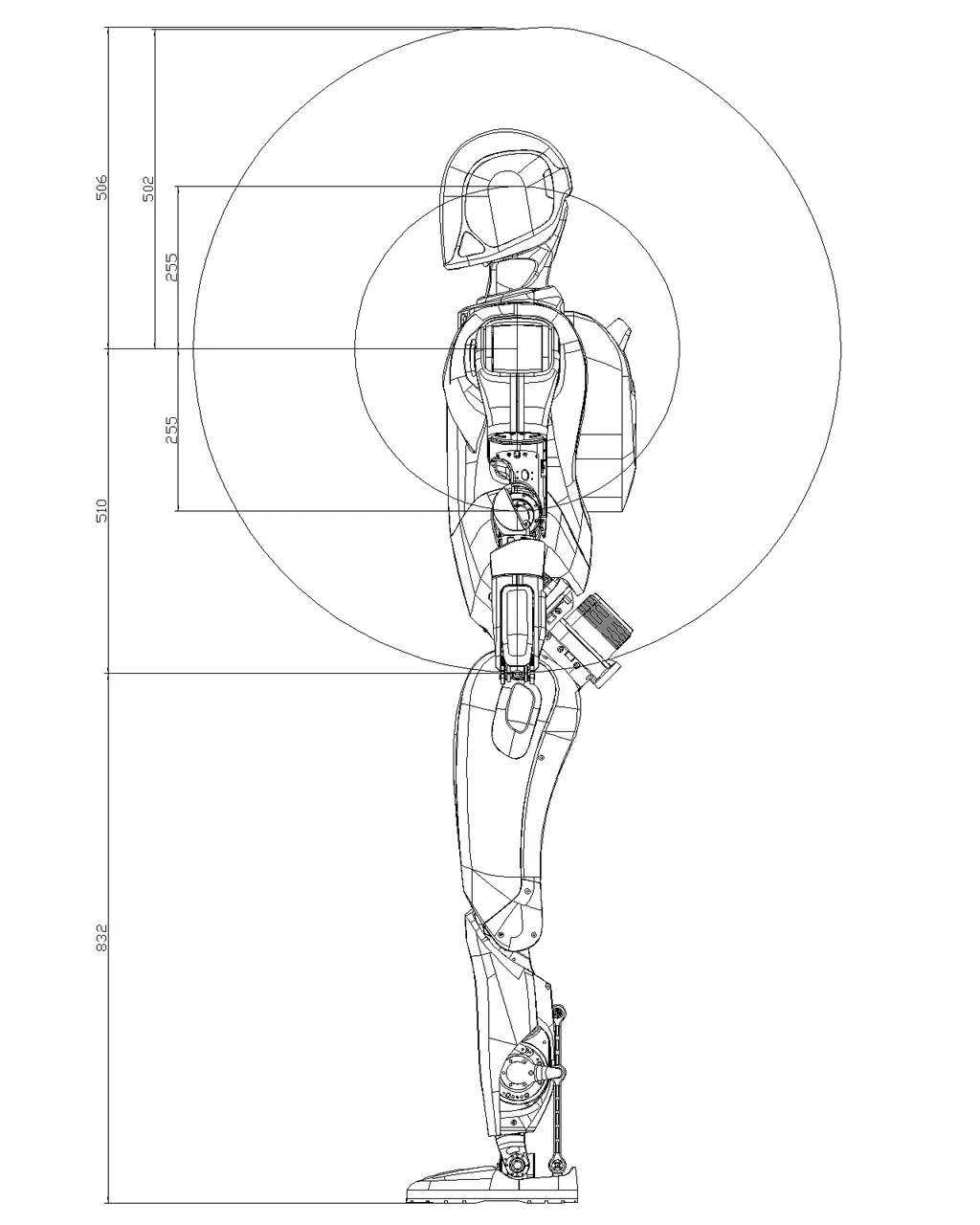
1.4 整机工作空间
Section titled “1.4 整机工作空间”