2. 操作指南
2. 操作指南
Section titled “2. 操作指南”进行此操作前,需要先按照开箱文档完成机器人开箱操作。
Step1:打开客户端Aim Master
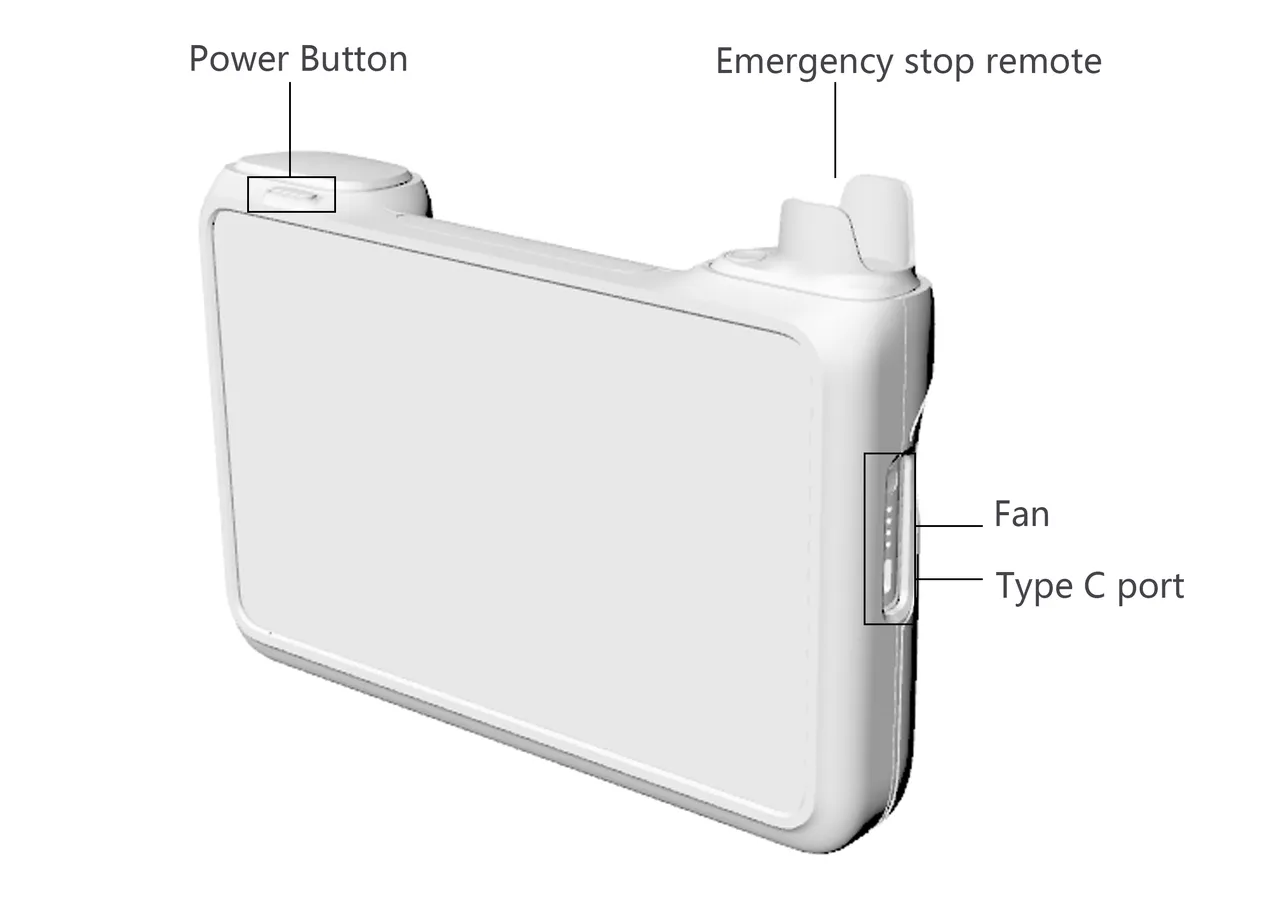
Section titled “Step1:打开客户端Aim Master”打开智元官方控制器,控制器电源键位于顶部,长按开机键直到电源点旁边的白灯亮起。控制器开机后会自动打开AimMaster,并进入机器人开机向导。机器人充电口在遥控器底部位置。
在机器人类型选择界面选择“远征A2”,进入“远征A2”开机向导,并根据开机向导的提示逐步完成机器人开机操作。

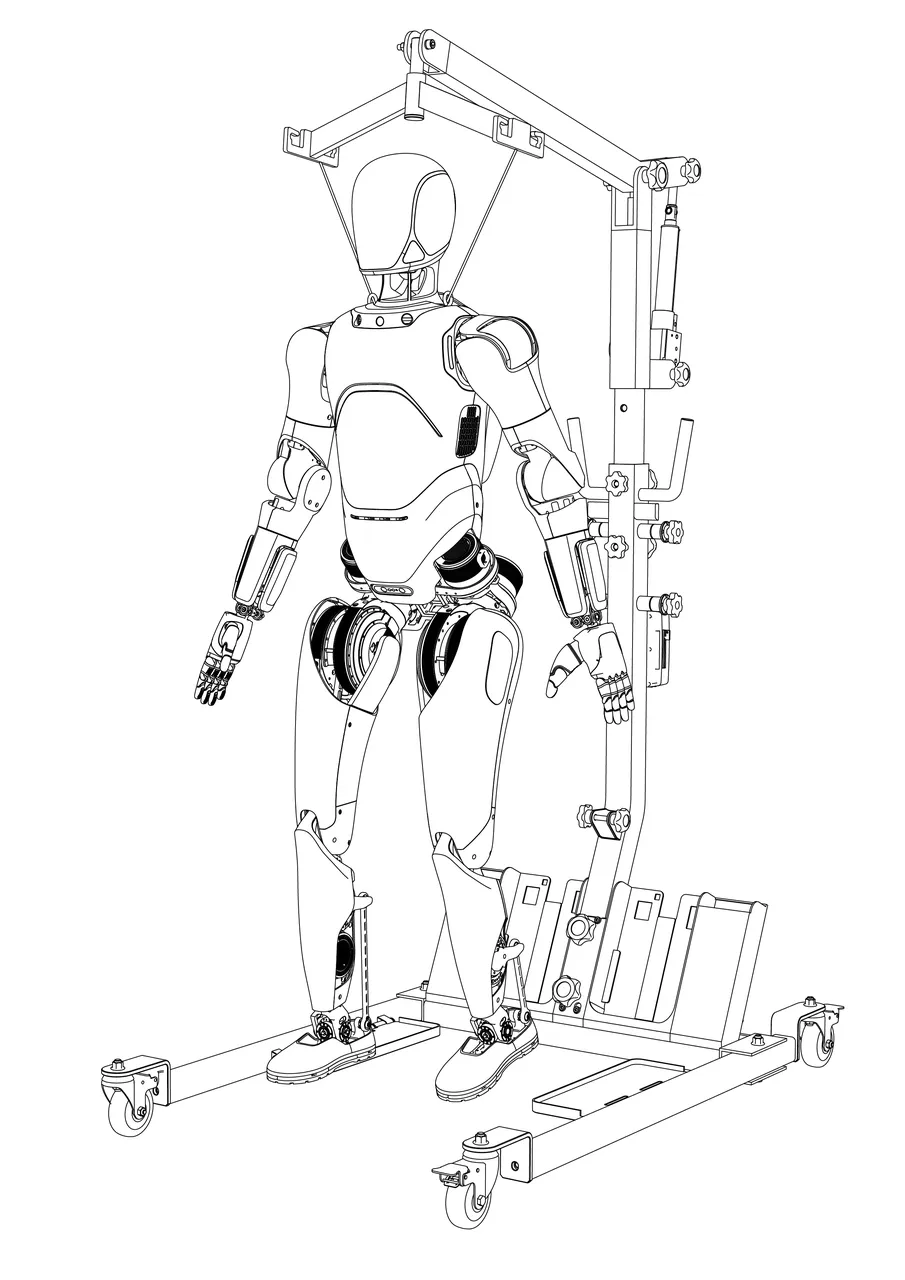
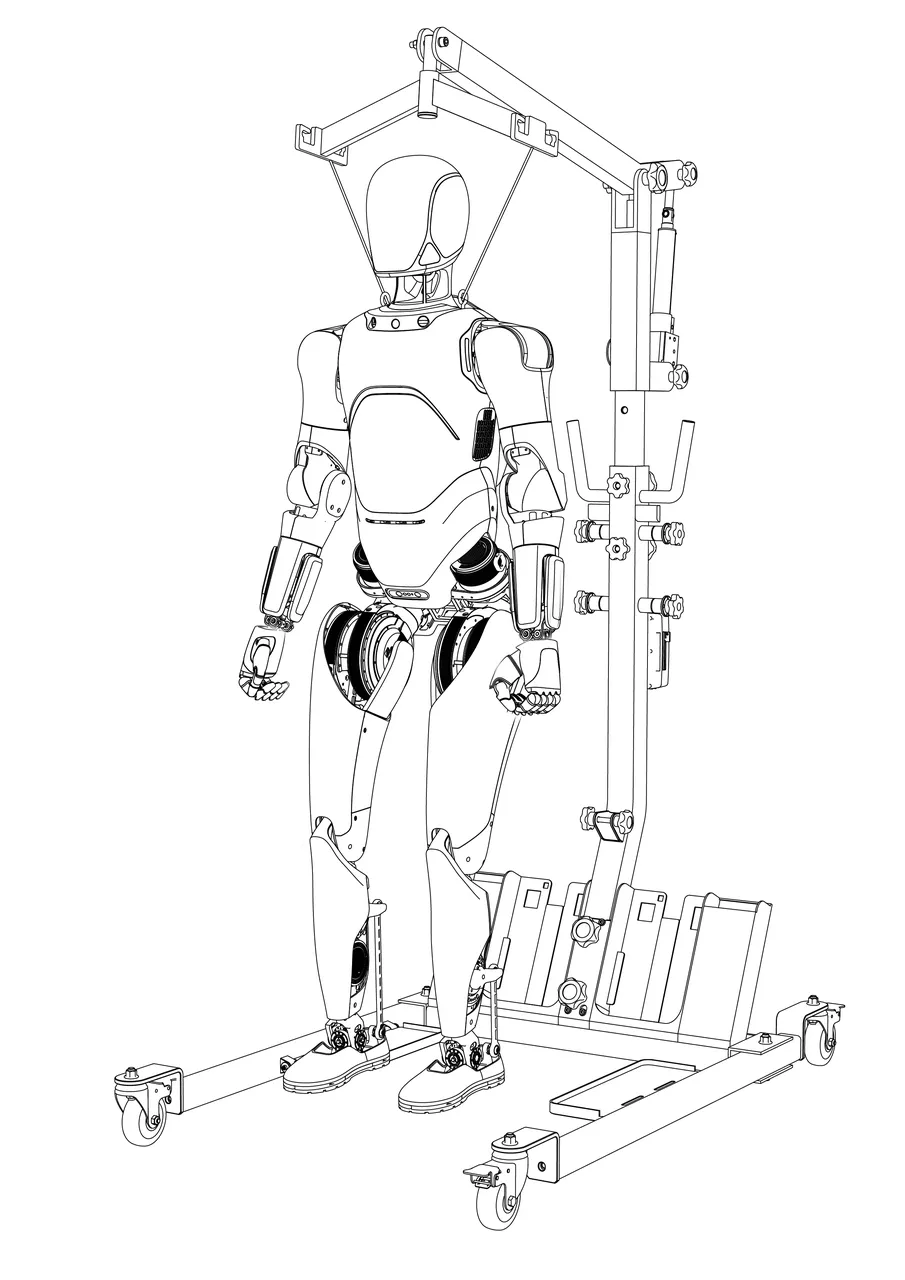
Step2:吊起机器人
Section titled “Step2:吊起机器人”在给机器人开机前,需要先将机器人吊起。机器人通过肩部的吊环和缆绳连接到电动移位器顶部的挂钩上,手动操作电动移位器将机器人吊起至如图所示位置,确保机器人双脚完全离地。
注意:
在搬动机器人、吊起机器人起过程中,请注意不要让灵巧手受到挤压或撞击。

机器人吊起后,在AimMaster界面上点击“下一步”。
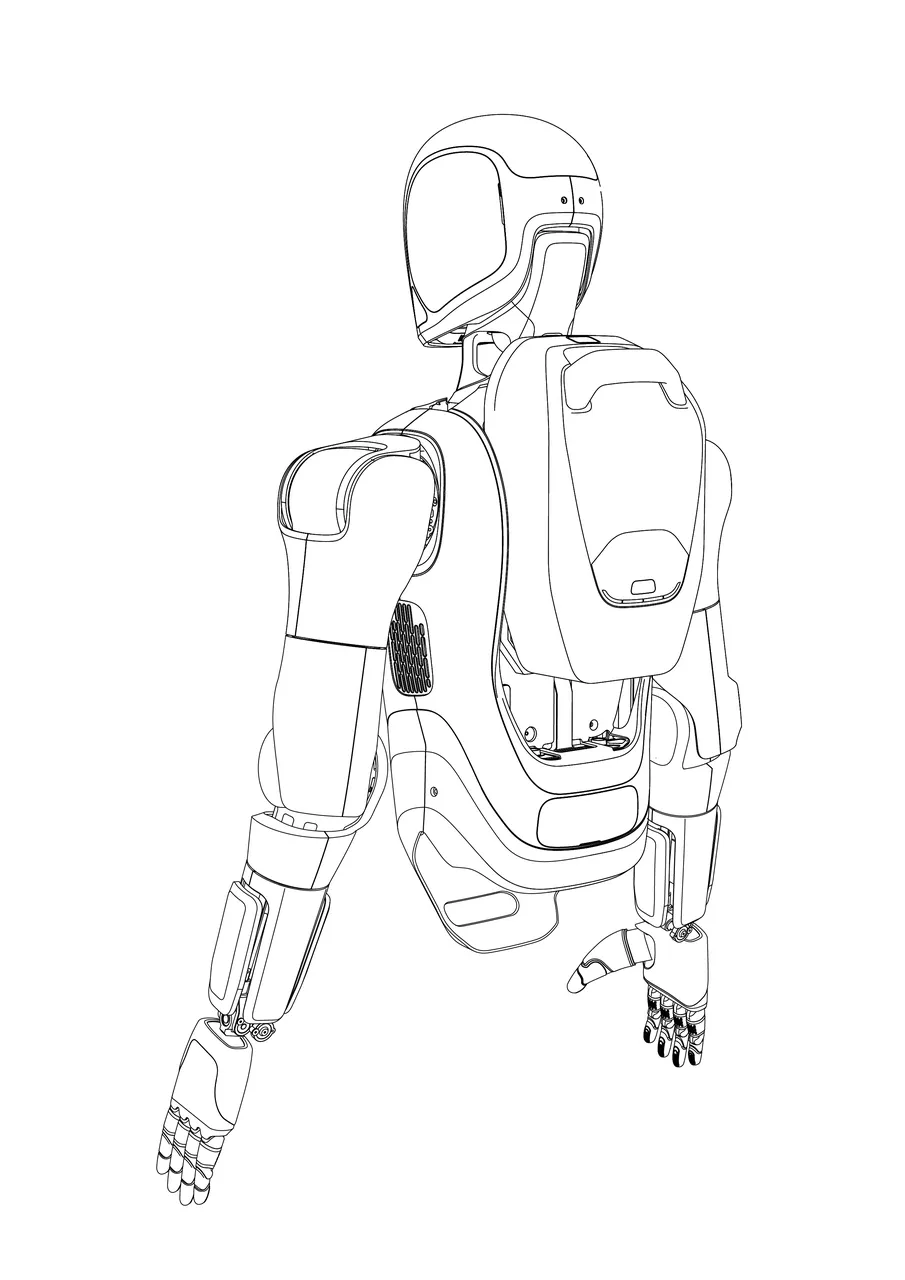
Step3:安装电池并开机
Section titled “Step3:安装电池并开机”机器人的电池安装在机器人背部。确认电池电量充足,并将电池从上向下滑入机器人背部的电池槽安装。电池滑动到底部的时候会听到“咔哒”一声代表电池安装到位。
长按机器人腰部后侧的开机键开机,机器人电源接通时开机按钮内部的LED灯会亮起。
(电源按钮操作说明:长按开机;短按后立即长按关机)

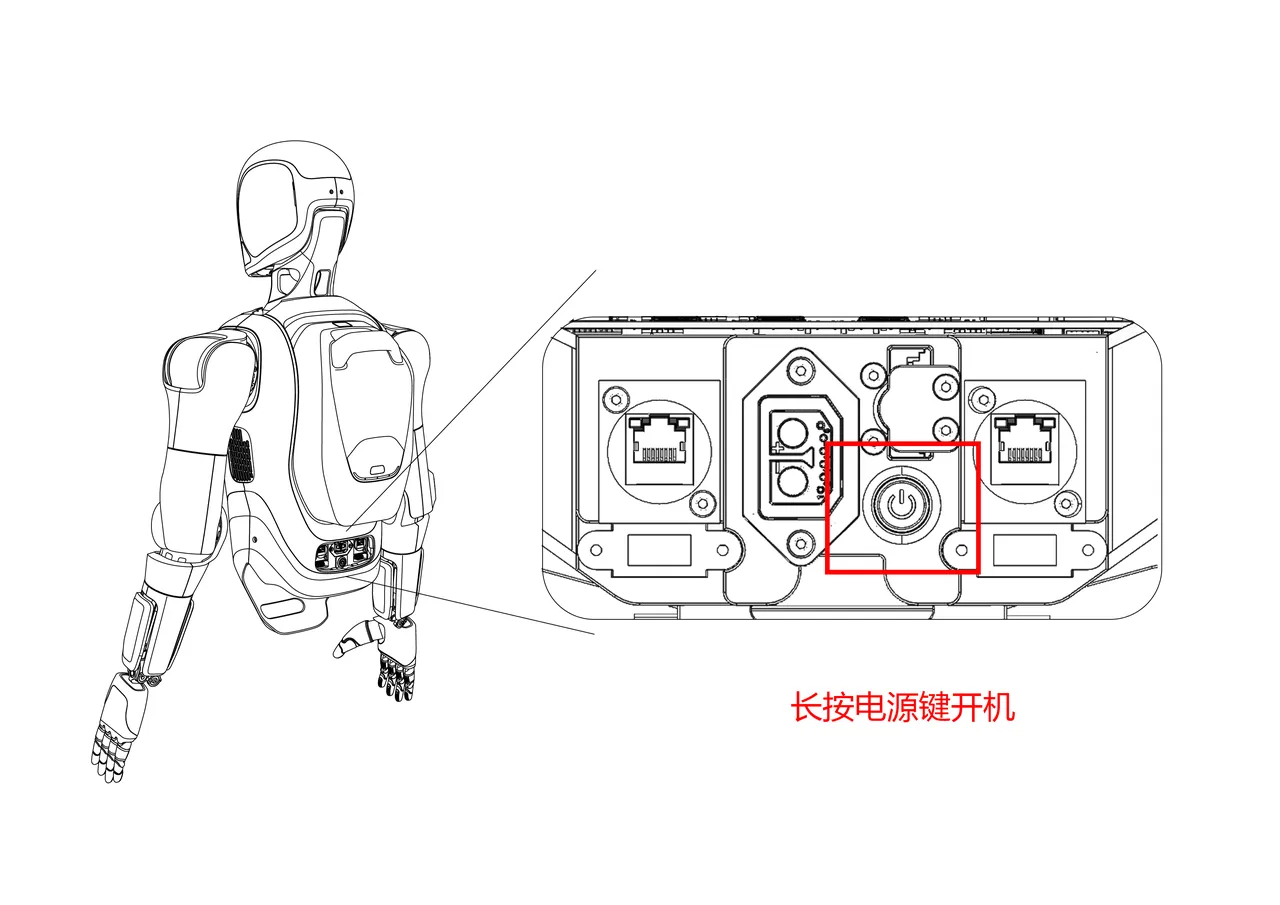
机器人开机完成后,在AimMaster界面上点击“下一步”。
Step4:无线急停使用方式
Section titled “Step4:无线急停使用方式”急停遥控器使用简单,出厂前已配对好,开箱即用。默认状态下,遥控器处于释放状态,电机正常供电。遇到紧急情况,按下按钮即可断开电机电源;问题解决后,旋转按钮恢复释放状态,电机重新上电。信号灯绿色表示正常,红色表示异常,满电时显示4颗电量灯。

急停遥控器
机器人关节自检过程中,机器人的脖子会小范围转动自检。机器人关节自检完成后,在AimMaster界面上点击“下一步”。
Step5:连接机器人
Section titled “Step5:连接机器人”完成解除急停步骤后,AimMaster会显示连接机器人界面。点击连接按钮即可完成连接,也可以采用手动输入IP连接。

连接方式与安全校验:
使用前建议:为确保安全,首次使用遥控器后,请优先设置机器人授权密码,以防止未经授权的设备连接。
连接步骤:
2.1 机器人IP 连接
Section titled “2.1 机器人IP 连接”- 点击页面下方提示文字,弹出输入框,手动输入IP连接机器人。
- 弹出密码输入框,输入正确密码即可连接。
- 若密码错误,提示“连接异常,请重新输入密码”。
- 每次 IP 连接需输入密码,密码存储在设备上。
- 机器人IP 可在【设置】-【无线局域网】中进行查看


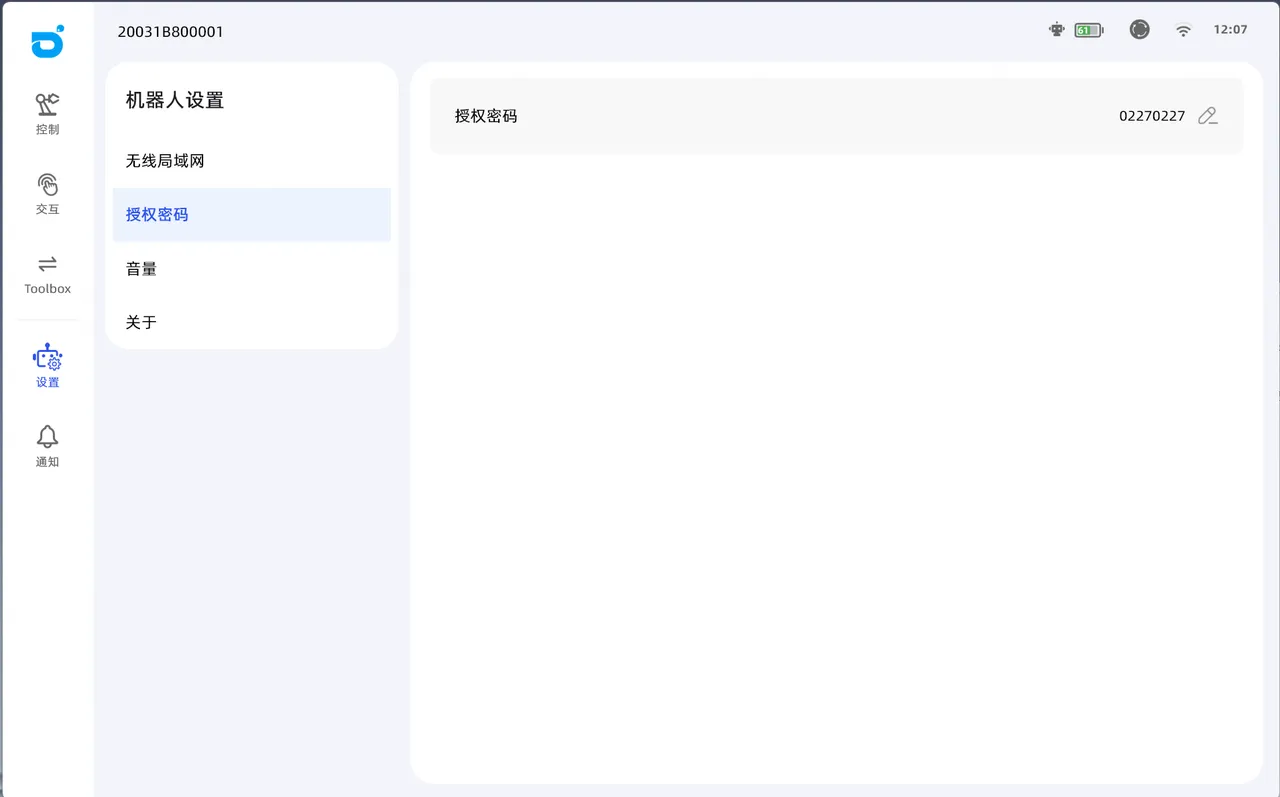
查看/更改密码
- 进入【设置】-【授权密码】页面查看或修改密码。
- 输入新密码(至少 8 位),点击“确认”。
机器人连接成功后,AimMaster界面会显示“连接成功”字样,点击“下一步”。
Step6:切换站立姿态
Section titled “Step6:切换站立姿态”在机器人站立前,需要先在吊起状态下将机器人切换至准备站立姿态。在AimMaster的“切换站立姿态”界面上点击“切换姿态”按钮,机器人将自动调整头部、手臂、腿部位置至准备站立姿态。
准备站立姿态下,机器人双臂微曲,手腕平行于小臂,双腿微曲,脚掌大致平行于地面。
注意:
切换姿态过程中机器人关节将运动,请远离机器人,确保机器人周边空间充足。

站立姿态切换完成后,在AimMaster界面上点击“下一步”。
Step7:降下机器人
Section titled “Step7:降下机器人”电动移位器的使用说明:将电动移位器面对机器人背后放置,并保证机器人处于电动移位器两脚中间的站立位置。确保安全后,点击电动移位器上的降下按钮,观察电动移位器的下降状态。直至机器人双脚完全接触地面,悬挂绳完全放松,有一些余量。

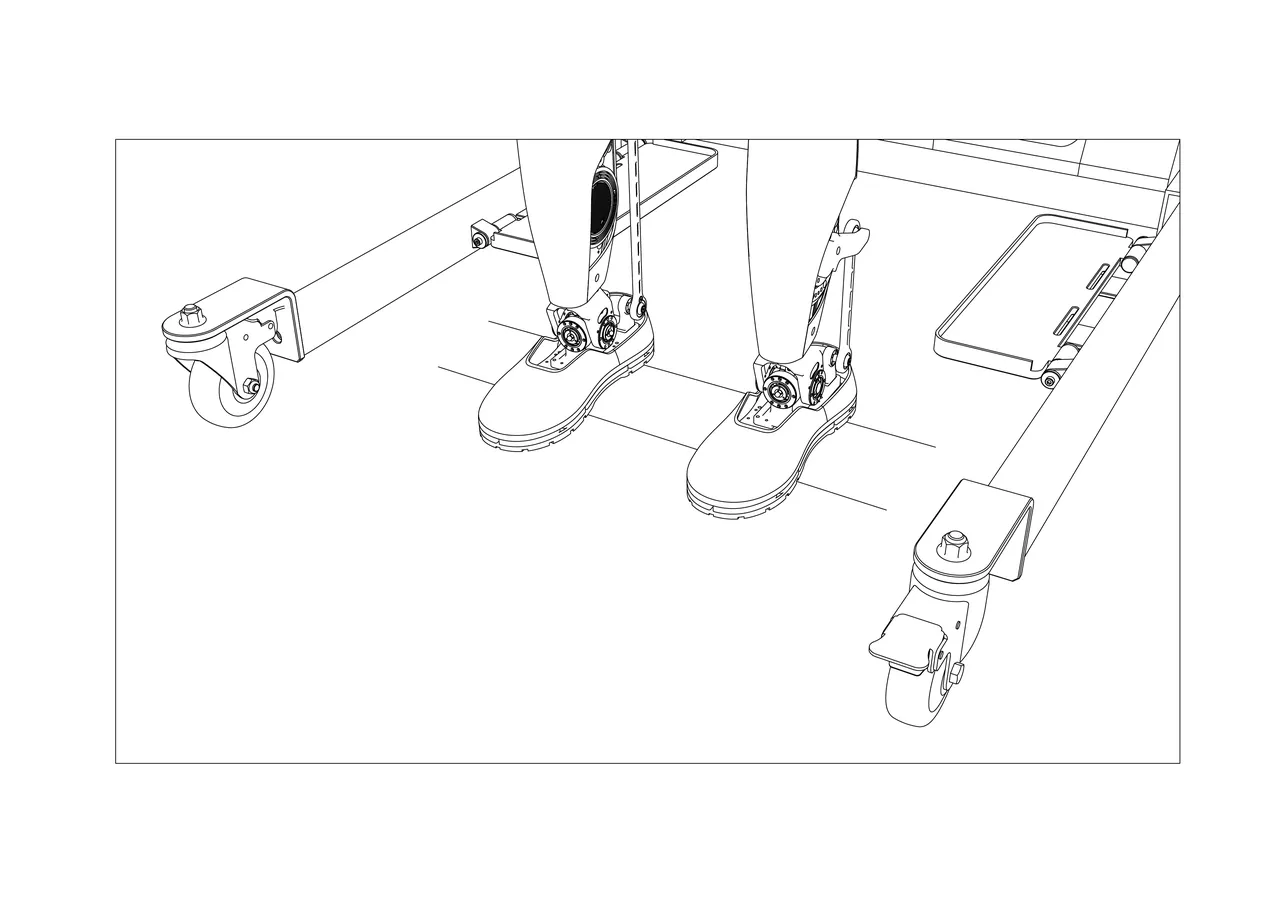
完成机器人降下操作后,在AimMaster界面上点击“下一步”。
Step8:切换站立模式
Section titled “Step8:切换站立模式”在AimMaster的“切换站立模式”界面上点击“开启站立模式”按钮,机器人将进入站立模式。在看到“站立成功!”字样时代表机器人已经站立完成。此时可将机器人肩部的挂绳取下,机器人将保持自主平衡站立。
注意:
在切换站立模式之前,请确保机器人已经下降至地面,双脚与地面完全接触。
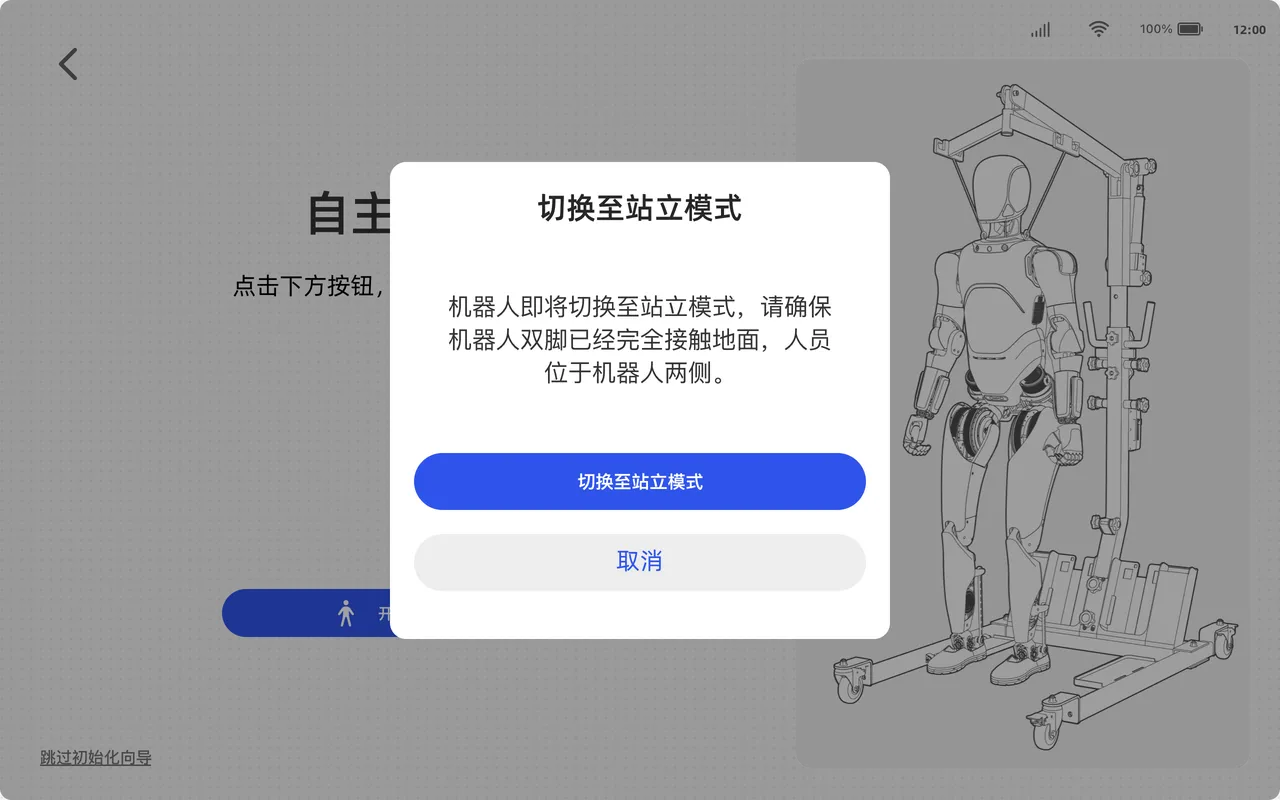

点击“完成”退出足式开机向导,AimMaster将进入工作台页面。

Step1:吊环安装
Section titled “Step1:吊环安装”升起待机站吊臂至机器人双脚完全离开地面。
Step2:吊起机器人
Section titled “Step2:吊起机器人”在机器人肩部安装吊环,并将机器人使用电动移位器吊起,直至机器人双脚完全离开地面。
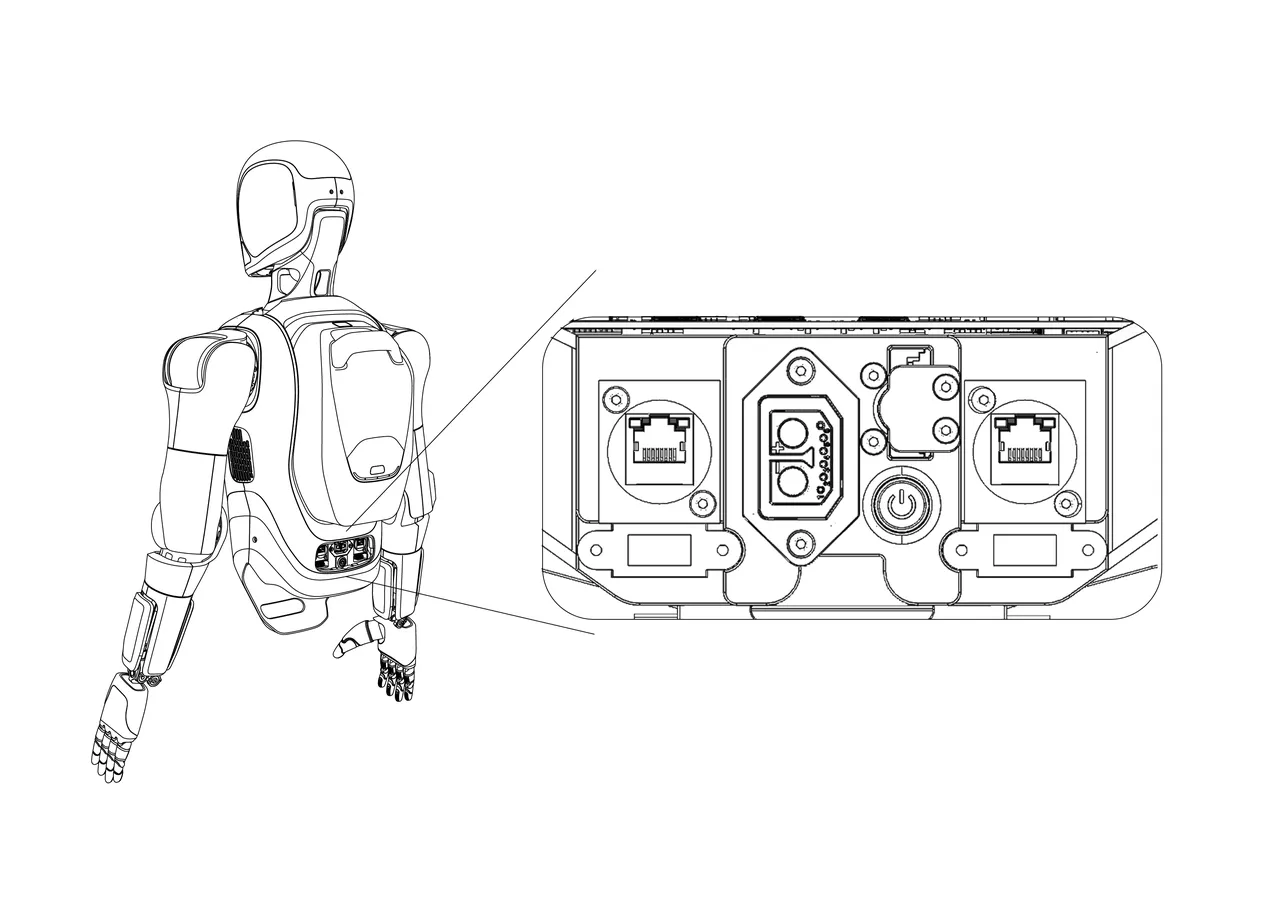
Step3:关机
Section titled “Step3:关机”按一下机器人腰部后侧维护仓内的电源按钮给机器人断电,关闭机器人。
三、运动控制
Section titled “三、运动控制”3.1 行走准备
Section titled “3.1 行走准备”在遥控“远征A2”机器人行走前需要先确保机器人已经完成站立,机器人站立流程可参考前序章节。
机器人站立完成后,点击AimMaster主界面左侧Toolbox面板,查看相应的模式功能切换栏。
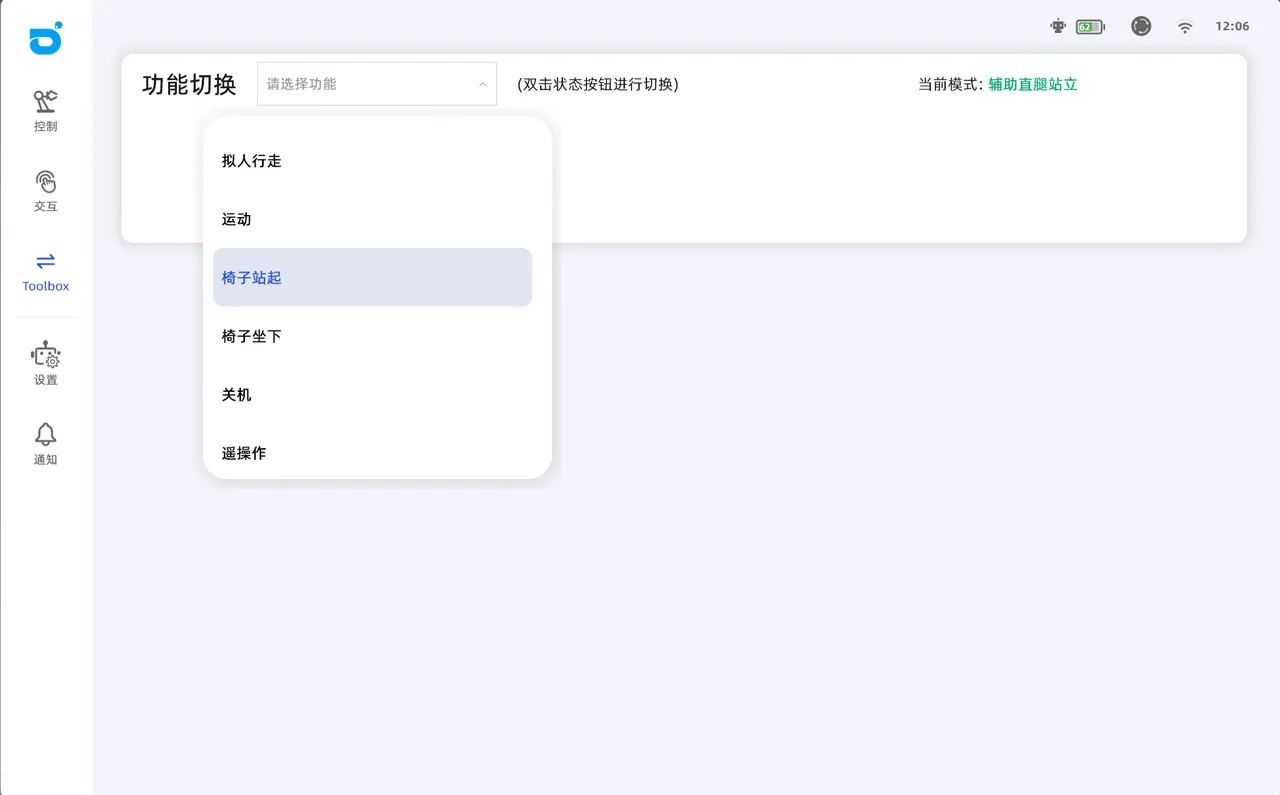
双击切换至“行走,自然摆臂”模式,依照流程图,点击执行相关动作,机器人开始原地踏步运动;切换至“运动”,机器人将可以执行交互动作。

3.2 遥控行走
Section titled “3.2 遥控行走”点击软件侧边栏上的“控制”按钮,进入“遥控行走”页面。

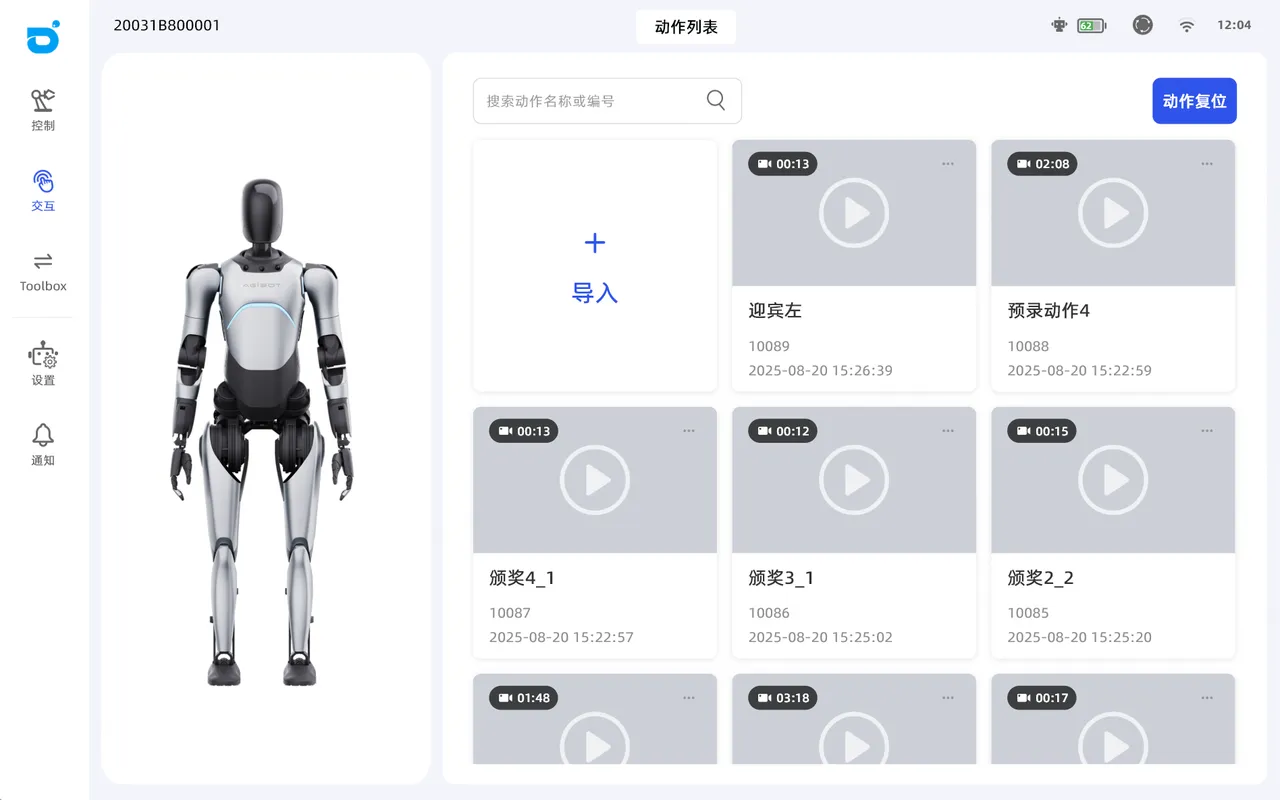
3.3 交互动作
Section titled “3.3 交互动作”在侧边栏点击“交互”,切换至交互页面。在屏幕上方点击“动作列表”,进入动作列表页。上下滑动查看机上预置的机器人动作,点击卡片左上角的播放按钮播放动作,机器人会开始表演该动作。
在屏幕上方点击“自定义播报”,进入自定义播报列表页,支持用户新建播报内容。以及滑动查看播报列表,双击即可播放。
四、充电&换电
Section titled “四、充电&换电”4.1 充电
Section titled “4.1 充电”Step1:打开维护仓
Section titled “Step1:打开维护仓”打开机器人背后维护仓盖板
Step2:插入充电接头
Section titled “Step2:插入充电接头”充电口位于机器人机身腰部后侧盖板下方,先将盖板取下,再将电源适配器充电头插入充电口。
4.2 换电
Section titled “4.2 换电”Step1:关机
Section titled “Step1:关机”参考3.3的关机流程。
Step2:卸下电池
Section titled “Step2:卸下电池”拇指按住电池顶部方形的机械解锁按钮,四指向上提拉电池卸下
Step3:安装电池
Section titled “Step3:安装电池”参考开机step3安装电池流程