1. A2 Lite Overview
1. A2 Lite Overview
Section titled “1. A2 Lite Overview”1.1 Component Description
Section titled “1.1 Component Description”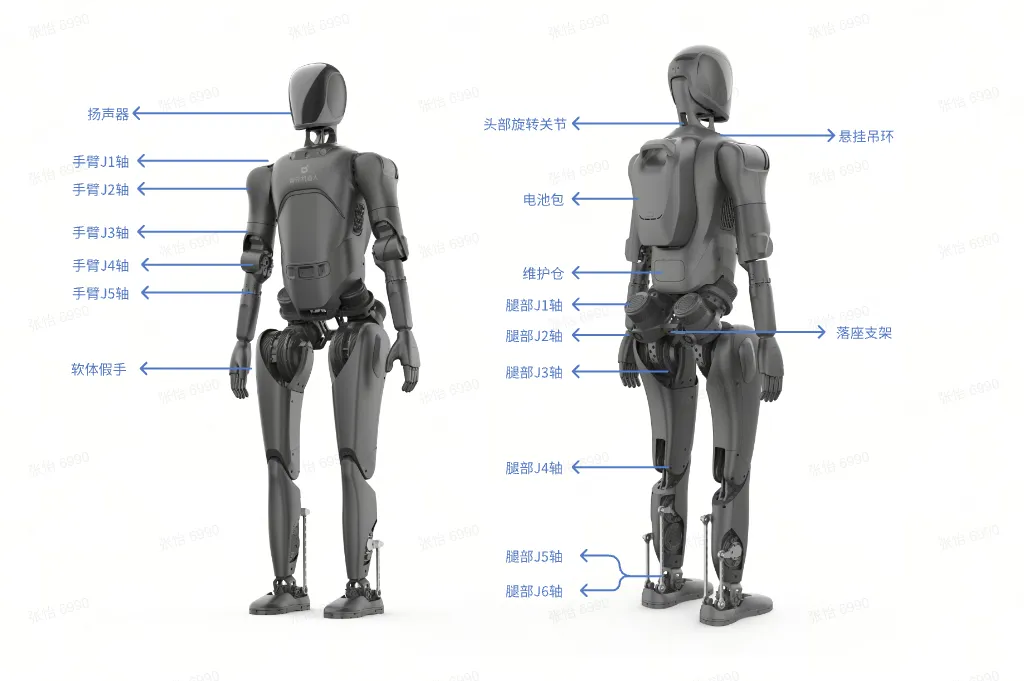
1.2 Network Topology
Section titled “1.2 Network Topology”The A2 Lite has two different hardware models, with different suppliers, so the network topology also varies. These are referred to as the T3 model and the P1 model.
You can determine which model it is by checking the network interface name using the ip a command on the actual machine.
1.2.1 T3 Model
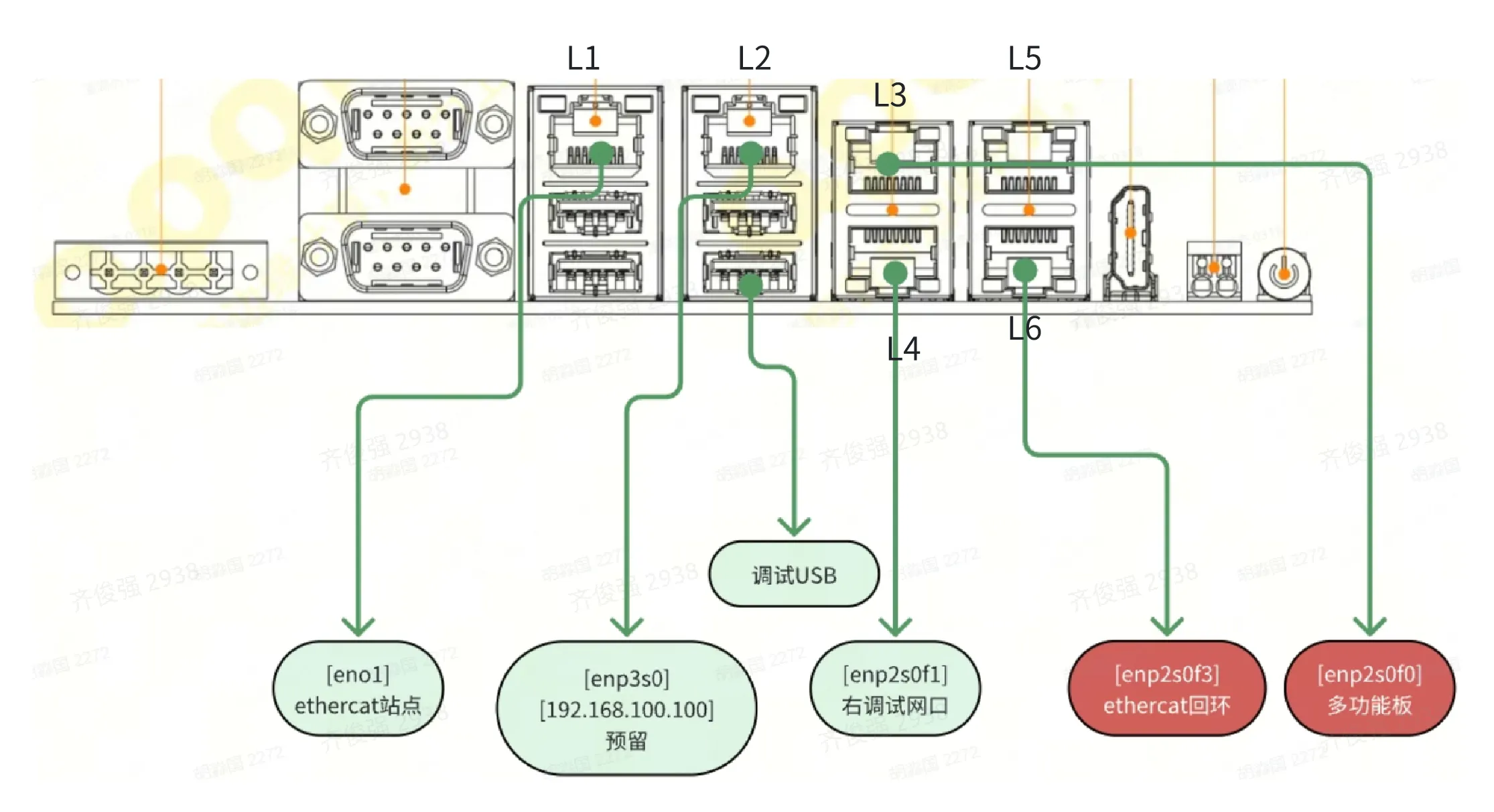
Section titled “1.2.1 T3 Model”Hardware Architecture Diagram
Software Network Topology Diagram
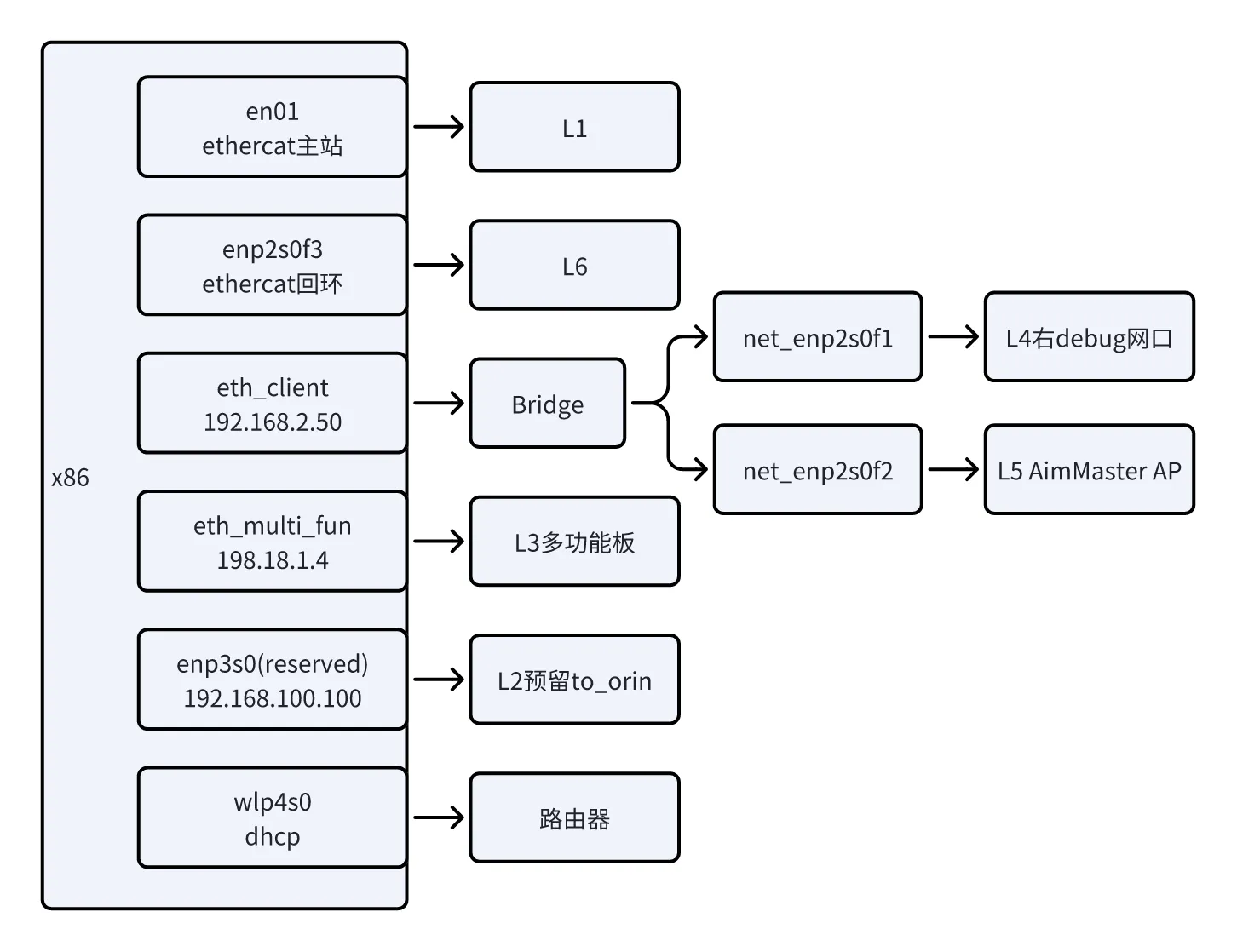
Where:
- The right debug network port is the debugging network port at the back of the robot, with a fixed IP address of 192.168.2.50.
enp3s0is the reserved network port for adding a computing platform, and it is recommended to use this port when adding a computing platform.
1.2.2 P1 Model
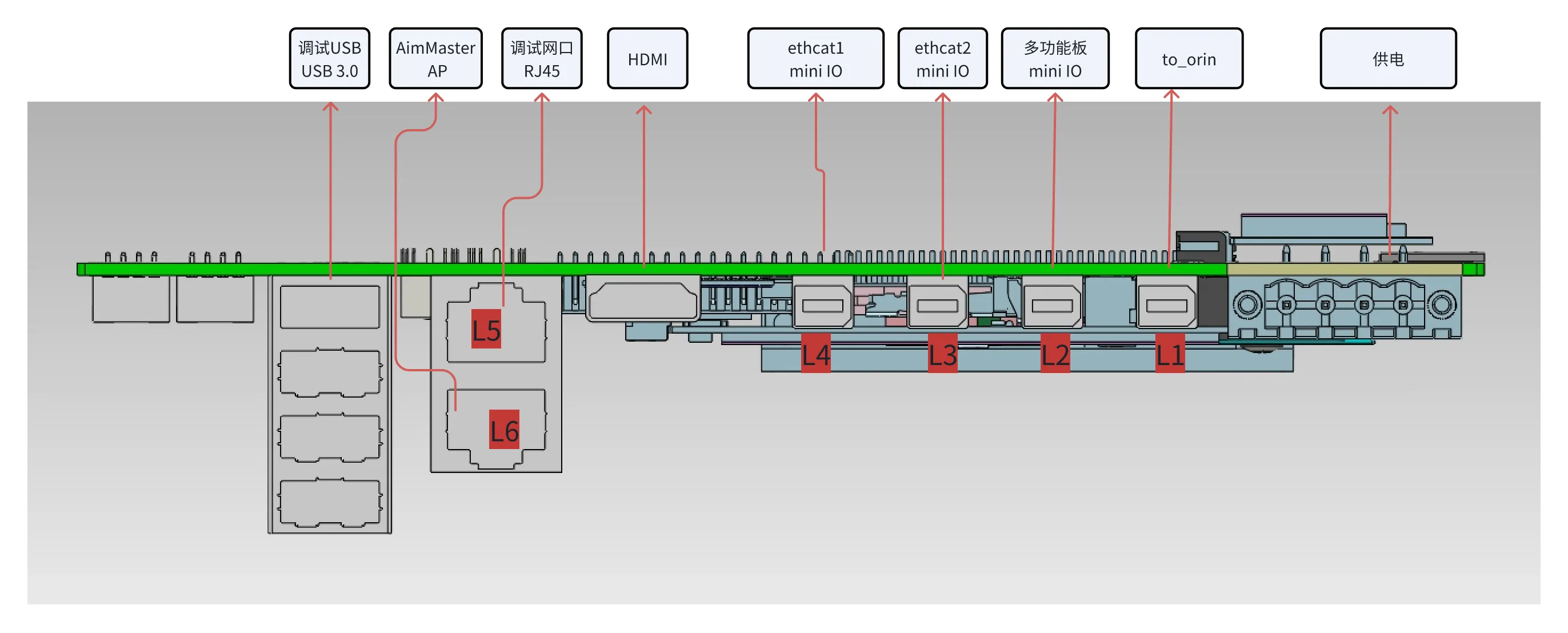
Section titled “1.2.2 P1 Model”Hardware Architecture Diagram
Software Network Topology Diagram
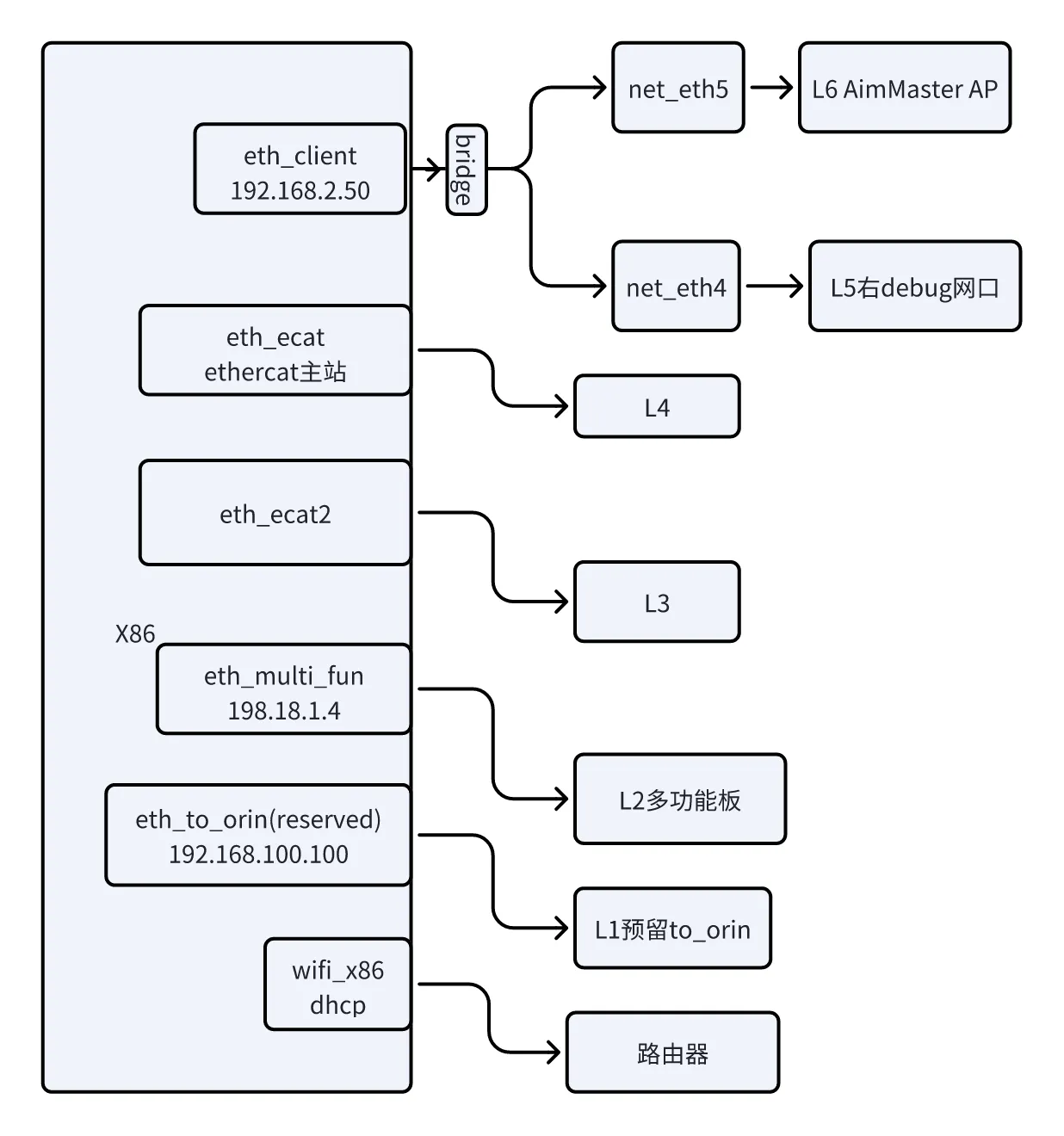
Where:
- The right debug network port is the debugging network port at the back of the robot, with a fixed IP address of 192.168.2.50.
eth_to_orinis the reserved network port for adding a computing platform, and it is recommended to use this port when adding a computing platform.
1.3 Robot Specifications
Section titled “1.3 Robot Specifications”| Primary Category | Secondary Category | Item | Details |
|---|---|---|---|
| Product Basic Information | Height | 169cm | |
| Dimensions | 169(H) * 75(W) * 30(L) cm | ||
| Net Weight | ≈63kg | ||
| Active Degrees of Freedom | Dual arms 52dof, dual legs 62dof, head 1dof | ||
| Product Features | Electrical Performance | Battery Life | Whole machine force control standing battery life: 4h35min, whole machine walking battery life: 1h35min |
| Battery Capacity | 14.4Ah | ||
| Charging Time | 2h | ||
| Charging Power | ≤500W | ||
| Charging Input Voltage | 110V-220V | ||
| Charger Output | 54.6V 8A | ||
| Environmental Adaptability | Operating Temperature and Humidity | 0~40℃, relative humidity 10% ~ 90%, no condensation | |
| Storage Temperature and Humidity | -20℃~70℃, relative humidity 10% ~ 90%, no condensation | ||
| IP Rating | Joint module: IP5X | ||
| Site Adaptability | Minimum Passage Width | Currently, the minimum width for remote control passage >1m, navigation minimum width >2m | |
| Maximum Obstacle Height | 20mm | ||
| Maximum Running Slope | 8% (angle 4.57 degrees) | ||
| Operation and Interaction | Perception Capability | Not supported | |
| Voice Capability | Not supported | ||
| Light Task Capability | Not supported | ||
| Remote Control Operation | Wireless remote controller | ||
| Speaker | 5W | ||
| Dance Development | Supported | ||
| Group Control Software | Supported | ||
| Mobility | Maximum Speed | Maximum speed 0.8m/s, daily use ≤0.6m/s | |
| Movement Modes | Supports parallel movement, diagonal movement, and in-place turning | ||
| IoT Capabilities | Communication Protocol | TCP/IP | |
| Communication Module | Wifi | ||
| Intelligent Control Parameters | Basic Computing Board | 16-core high-performance CPU | |
| Arm Typical Parameters | Dexterous Hand | Soft artificial hand | |
| Single Arm Rated Load | 1.5kg (excluding end effector) | ||
| End Effector Linear Speed | 1m/s | ||
| Arm Workspace | J1(Shoulder pitch): ±170° | ||
| J2(Shoulder roll): -30°~95° | |||
| J3(Shoulder yaw): ±170° | |||
| J4(Elbow pitch): -1°~118° | |||
| J5(Wrist roll): ±170° | |||
| Leg Typical Parameters | Leg Workspace (with some deviation) | J1(Hip roll): -37~40° | |
| J2(Hip yaw): ±75° | |||
| J3(Hip pitch): -50°~110° | |||
| J4(Knee pitch): -5°~140° | |||
| J5(Ankle pitch): -30°~52° | |||
| J6(Ankle roll): ±28° | |||
| Head Typical Parameters | Head Workspace | Rotation joint: ±45° |
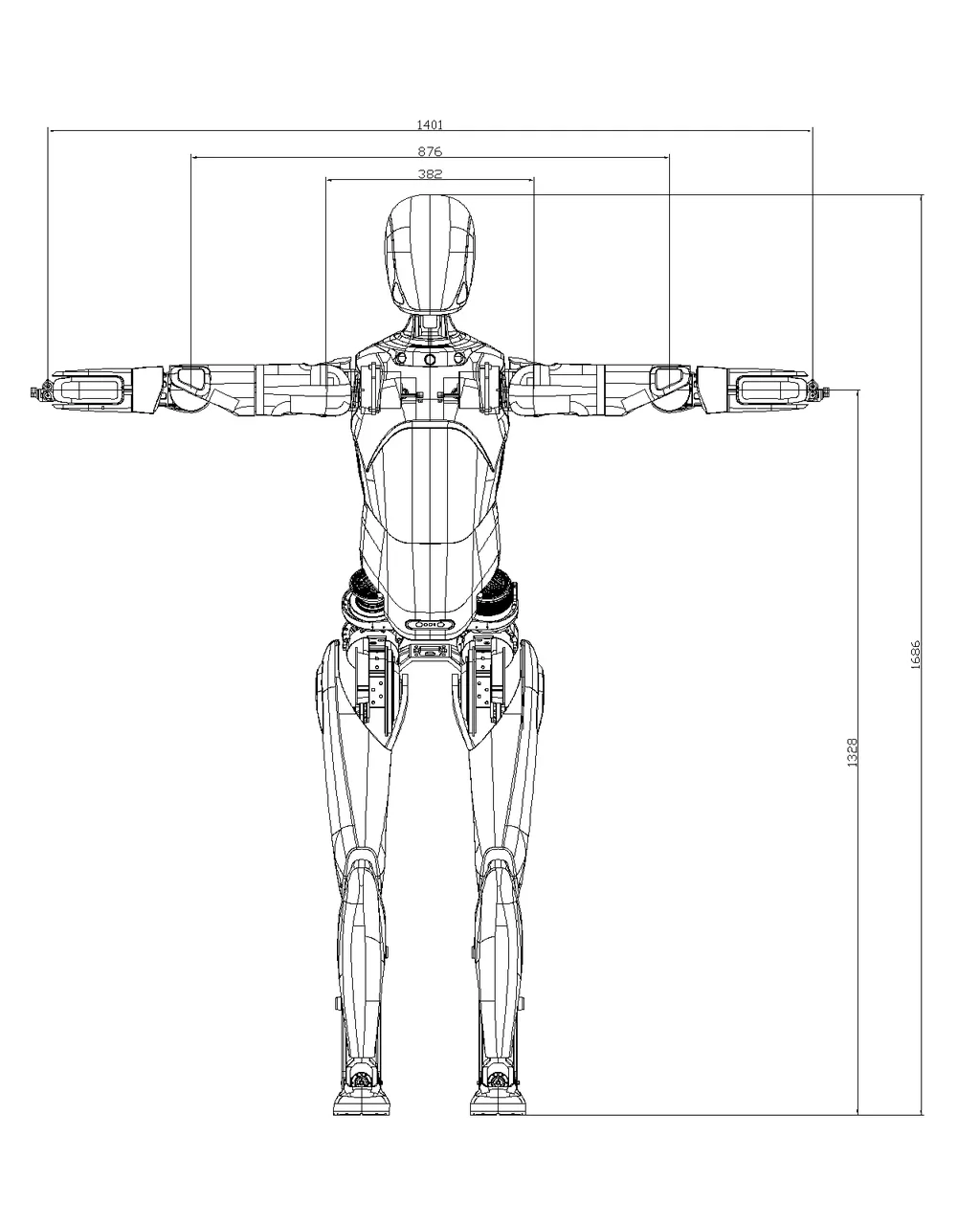
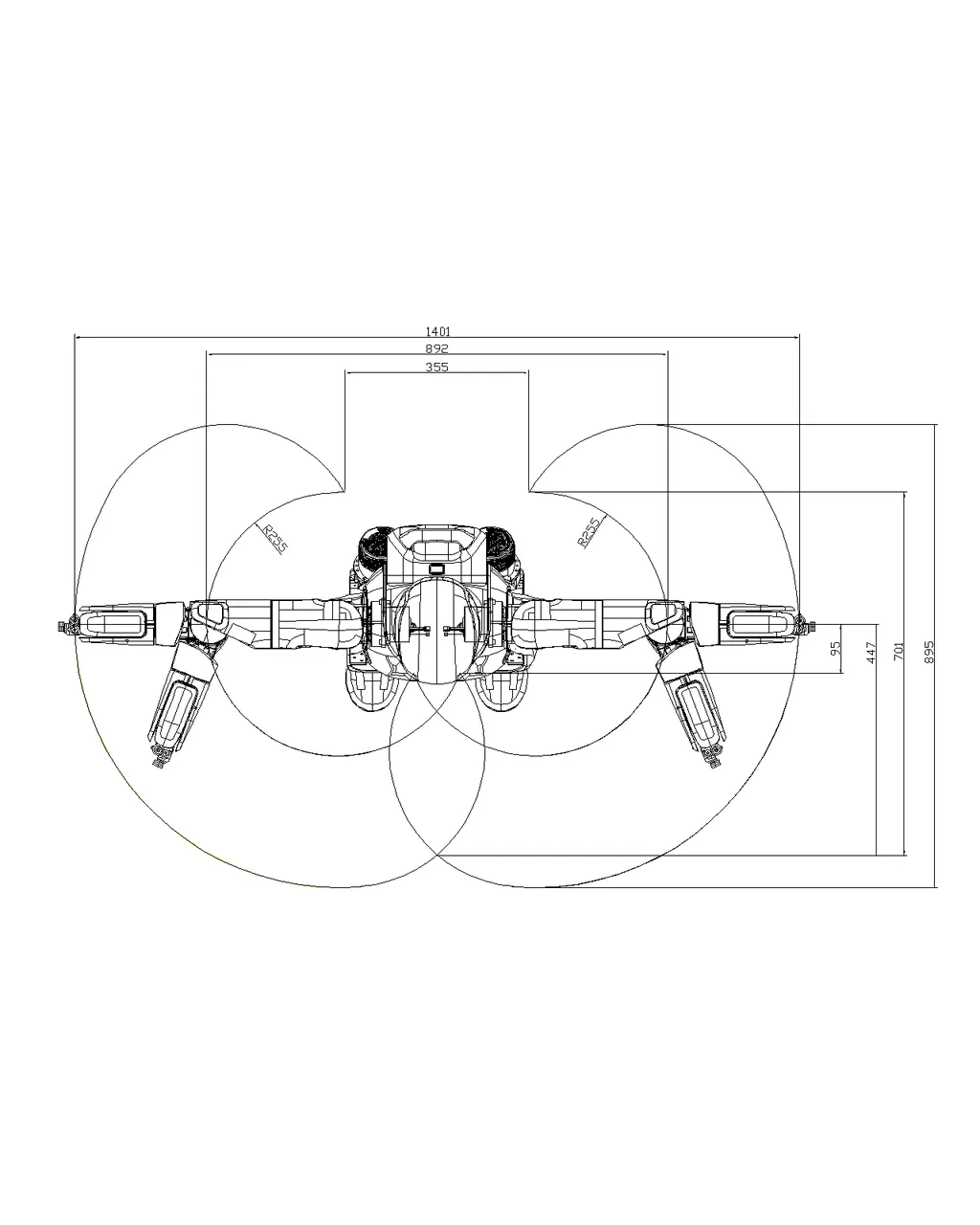
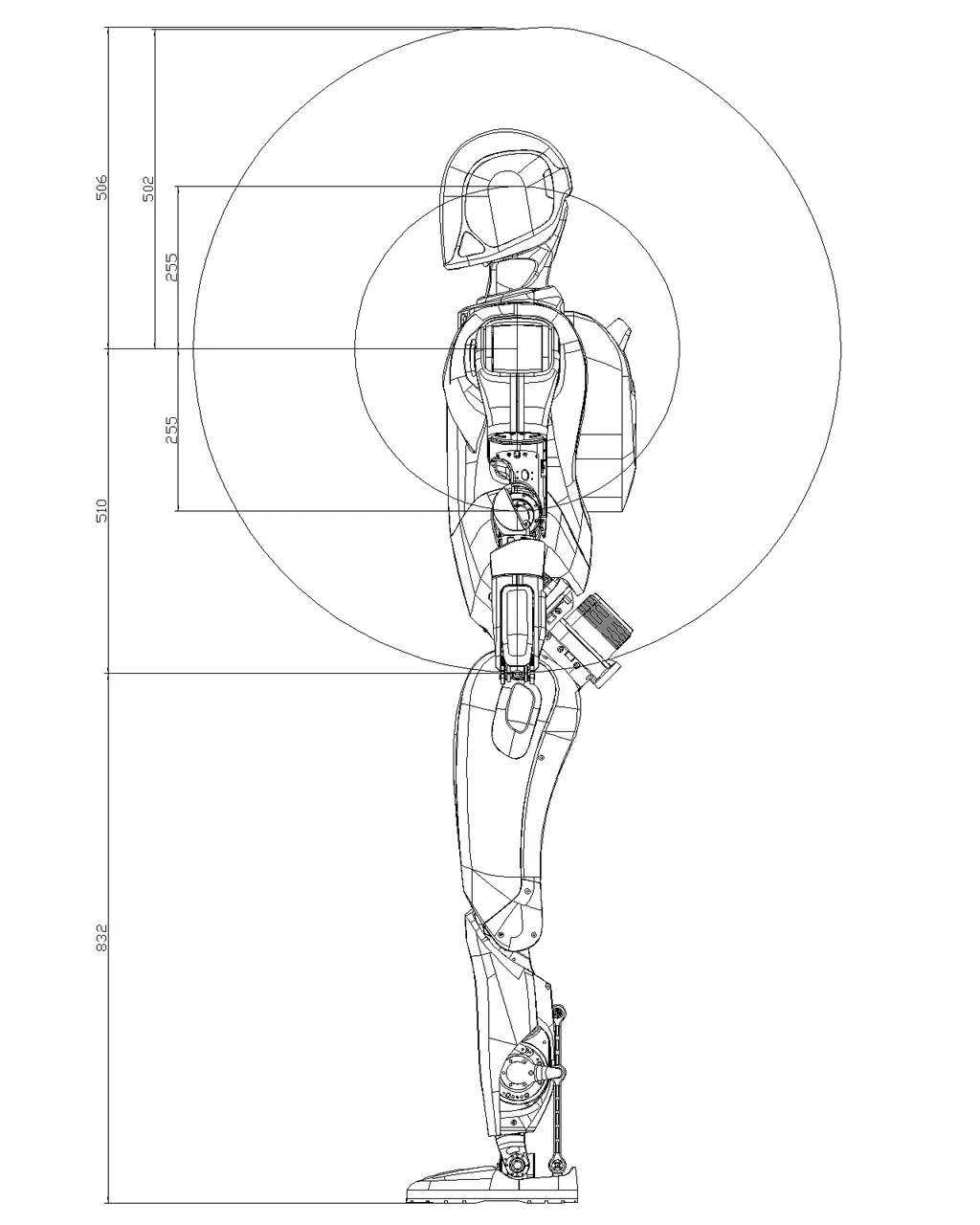
1.4 Whole Machine Workspace
Section titled “1.4 Whole Machine Workspace”