AimDK 使用指南
AimDK 使用指南
Section titled “AimDK 使用指南”AimDK 的概念有别于传统 SDK,传统 SDK 是提供给开发者一个软件包,其中提供动态库和头文件,开发者通过调用动态库中的函数来实现功能;而 AimDK 选择了更适合于机器人开发者的方式,提供给开发者机器人上各个模块的接口,开发者通过调用各个模块的 RPC 接口和 Channel 接口来实现功能。
本页面包含一份详细的 AimDK 使用指南,带您了解 AimDK 中的各个概念和使用方法。
机上软件系统架构如下图所示:
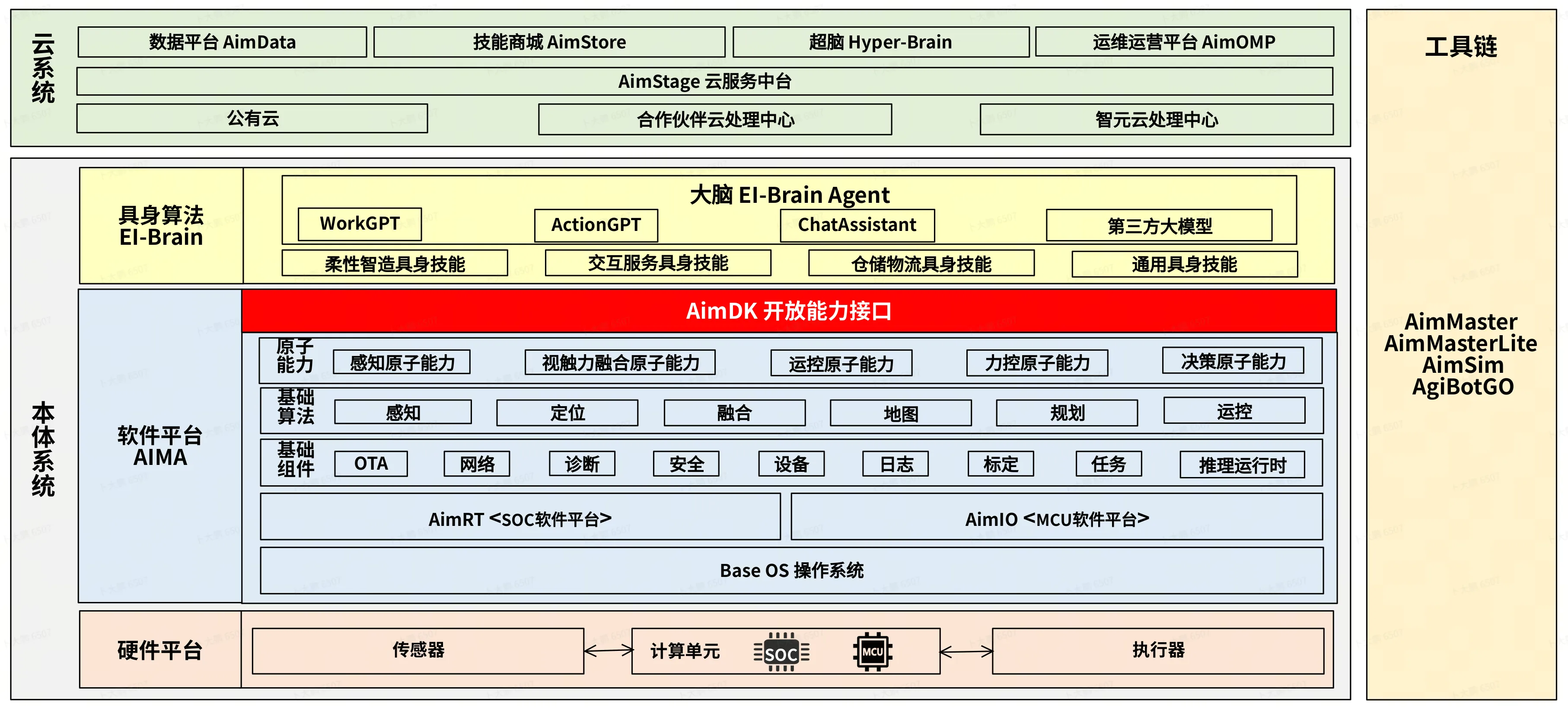
可以看到 AimDK 所处的层级位于机器人软件平台 AIMA 之上,AimDK 中各个模块的接口均以 文档 + 协议 的形式进行提供,文档中会介绍各个接口的调用方法,协议中包含各个接口的 protobuf 定义以及 ROS2 的定义,协议文件在 A2 AimDK 仓库的 protocol 目录下,若出现协议文件与文档不一致的情况,以协议文件为准。
AimDK 接口本质上是机上各个软件和算法模块各自提供的接口,有两种形式,一种是 RPC 接口,另一种是 Channel 接口,RPC 接口对应于 ROS2 中的 Service,Channel 接口对应于 ROS2 中的 Topic。
RPC 接口
Section titled “RPC 接口”RPC 接口一般为高层控制接口,例如指定机器人导航到特定点、切换运动控制状态机等,AimDK 提供了 HTTP 的调用方式(接口后端中会标注 HTTP 后端),常见的调用方式如下(以命令行脚本为例,实际 HTTP 协议可以被任何语言调用):
curl -i -H 'content-type:application/json' \ -H 'timeout: 1000' \ -X POST 'http://192.168.100.100:56421/rpc/aimdk.protocol.HalBmsService/GetBmsState' \ -d '{}'其中
192.168.100.100为机器人 x86 开发板的 IP 地址,提供相应服务的模块位于哪块开发板上即填写对应的 IP 地址,各个模块位于的开发板可以参考 机上软件分布 小节。56421相应服务的 HTTP 端口号,各个模块的 HTTP 端口号可以参考 机上软件分布 小节。content-type:application/json为请求头,表示请求体为 json 格式,必须要加上这个请求头。timeout: 1000为请求头,表示请求超时时间,单位为毫秒,这里设置为 1000 毫秒,即 1 秒,该字段可以不设置。aimdk.protocol.HalBmsService/GetBmsState为获取电池状态的 RPC 接口名称,各个接口的具体名称在对应模块的文档和示例中可以找到。-d '{}'为请求体,这里为空代表其中的字段都为默认值,如果需要传入特定字段,可以传入 json 字符串,例如-d '{"bms_state": 1}'表示传入 bms_state 字段,值为 1(仅为举例,具体字段名称和值需要参考对应模块的文档和示例)。
Channel 接口
Section titled “Channel 接口”Channel 接口一般为相对高频的控制和数据状态获取接口,例如获取机器人当前位置、获取机器人当前运动状态等,AimDK 提供原生 ROS2 的调用方式(接口后端中会标注 ROS2 后端),常见的调用方式如下(以 python 脚本为例,实际 ROS2 接口可以使用任意 ROS2 支持的语言进行开发):
#!/usr/bin/env python3import rclpyfrom rclpy.node import Nodefrom rclpy.qos import QoSHistoryPolicy, QoSProfile, QoSReliabilityPolicyfrom sensor_msgs.msg import Image
class ImageSubscriber(Node): def __init__(self, topic_name: str): super().__init__("image_subscriber")
self.topic_name = topic_name
qos_profile = QoSProfile( history=QoSHistoryPolicy.KEEP_LAST, depth=10, reliability=QoSReliabilityPolicy.BEST_EFFORT )
self.subscription = self.create_subscription(Image, topic_name, self.listener_callback, qos_profile) self.subscription
def listener_callback(self, msg: Image): self.get_logger().info(f"=== Received {self.topic_name} ===") self.get_logger().info(f" header: {msg.header}") self.get_logger().info(f" width: {msg.width}") self.get_logger().info(f" height: {msg.height}") self.get_logger().info(f" encoding: {msg.encoding}") self.get_logger().info(f" is_bigendian: {msg.is_bigendian}") self.get_logger().info(f" step: {msg.step}") self.get_logger().info(f" data length: {len(msg.data)}")
def main(args=None): rclpy.init(args=args) # 头部相机 color: /aima/hal/rgbd_camera/head_front/color # 头部相机 depth: /aima/hal/rgbd_camera/head_front/depth # 髋部相机 color: /aima/hal/rgbd_camera/waist_front/color # 髋部相机 depth: /aima/hal/rgbd_camera/waist_front/depth # 胸部左侧相机 color: /aima/hal/fish_eye_camera/chest_left/color # 胸部右侧相机 color: /aima/hal/fish_eye_camera/chest_right/color image_node = ImageSubscriber("/aima/hal/fish_eye_camera/chest_right/color") try: rclpy.spin(image_node) except KeyboardInterrupt: pass finally: image_node.destroy_node() rclpy.shutdown()
if __name__ == "__main__": main()在 ORIN 上运行上述脚本前需要设置如下环境变量:
source /opt/ros/humble/setup.bashexport ROS_DOMAIN_ID=232export ROS_LOCALHOST_ONLY=0export FASTRTPS_DEFAULT_PROFILES_FILE=/agibot/software/v0/entry/bin/cfg/ros_dds_configuration.xml一般情况下,请不要修改上述 dds 配置文件,其他配置未经测试,无法保证机上模块间通信正常。
机上所有 ROS2 的 topic 的默认 qos 设置为
history: keep_last depth: 10 reliability: best_effort请在接收和发送对应 topic 时调整 qos 保持一致,避免出现 qos 不兼容导致的无法通信问题。
机上软件分布
Section titled “机上软件分布”当前 A2 机器人旗舰款包含两块上位机开发板,分别为 x86_64 架构和 arm64 架构,以下简称为 x86 和 orin 开发板,而基础款机型只有一块 x86 开发板,各个模块在不同开发板上的分布情况如下:
| 模块 | 模块缩写 | 提供的接口功能 | 基础款所属开发板 | 旗舰款所属开发板 | HTTP 端口号 |
|---|---|---|---|---|---|
| 运动控制模块 | mc | 控制机器人行走、上肢运动、灵巧手运动、头部运动、手臂末端 SE3 控制 | x86 | x86 | 56322 |
| 地图管理模块 | mm | 地图相关信息查询,一般用于配合规控 pnc 进行使用 | 无 | orin | 50807 |
| 动作播放模块 | motion_player | 播放预录制动作(底层接口) | x86 | x86 | 56444 |
| 传感器数据接口 | hal-sensor | 获取传感器数据 | 无 | orin | 56422 |
| 健康诊断模块 | hds | 告警和异常查询 | x86 | orin | 50587 |
| 遥控模块 | rc | 动作和表情播放(高层接口) | x86 | x86 | 59001 |
| 规划控制模块 | pnc | 规控、导航相关接口 | 无 | orin | 53176 |
| 语音代理模块 | agent | 麦克风降噪音频流接口 | 无 | orin | 59301 |
| 语音交互模块 | interaction | tts 播放接口、音频文件播放接口 | 无 | orin | 59201 |
| 任务执行引擎模块 | task_engine | 展厅导览任务执行、任务状态查询 | 无 | orin | 57881 |
| 其他接口 | other | 电池电量查询、急停状态查询等 | 无 | orin | 视具体示例而定 |
A2 机器人上为两块开发板都预留了调试接口,位于机器人背部后侧,旗舰款从机器背后看,左边为 orin 调试口,右边为 x86 调试口,orin 调试口 IP 为固定的 192.168.2.50,x86 调试口采用 DHCP 获取 IP 地址,获取到的 IP 地址可以通过 ip addr 命令查看,基础款则只有 x86 调试口,同样采用 DHCP 获取 IP 地址。
A2 旗舰款上,orin 和 x86 开发板之间通过网线进行连接,互相通信可以使用 192.168.100.100 (x86 开发板) 和 192.168.100.110 (orin 开发板) 两个 IP 地址。
二开程序部署
Section titled “二开程序部署”-
不允许在 x86 开发板上部署程序
- x86 上运行着运控软件,在 x86 上部署程序可能因操作系统调度、CPU 负载、内存占用等因素导致运控程序异常,从而造成机器人出现异常甚至摔倒等情形。
-
简单二次开发程序
- 调用基本 RPC 接口进行高层控制,基于智元软件、算法进行展厅导览、语音交互等功能的开发程序
- 推荐部署在三方电脑(如笔记本电脑)或三方工控机上,并使用 HTTP 协议进行调用
-
复杂二次开发程序
- 需要调用 Channel 接口进行数据获取和机器人持续控制等,开发具身 AI 算法等
- 推荐部署在 orin 开发板上或三方工控机上,并使用 ROS2 进行开发
- 此时 RPC 接口仍然使用 HTTP 协议进行调用,Channel 接口使用 ROS2 进行调用
典型场景调用指引
Section titled “典型场景调用指引”AimDK 中接口按照模块进行划分,有时可能难以找到想要调用的某个接口位于哪个模块,有些功能需要调用多个模块的接口进行配合,还需要一些前置条件,本文档将针对一些典型场景以逐步骤的表格形式列出。
场景一:机器人基础行走
Section titled “场景一:机器人基础行走”| 序号 | 步骤 | 接口所属模块 | 接口类型 | 接口名称 | 备注 |
|---|---|---|---|---|---|
| 1 | 切换运动控制 Action 至名字带有 LOCOMOTION 的模式 | 运动控制模块 | RPC | pb:/aimdk.protocol.McActionService/SetAction | Action 状态机切换见相应文档 |
| 2 | 调用机器人下肢控制指令 | 运动控制模块 | Channel | /motion/control/locomotion_velocity | 以 20~100 Hz 的频率持续发送指令(包含前进速度、侧向速度、旋转速度三个参数)即可 |
可参考 examples/mc/walk.py 示例。
场景二:机器人上肢运动控制
Section titled “场景二:机器人上肢运动控制”机器人上肢控制有两种模式,一种是使用 PLANNING_MOVE 接口给末端发送 SE3 位姿,另一种是使用 JOINT_SERVO 接口给上肢各关节发送弧度值(该指令透传给硬件抽象层,直接控制硬件,需要保证发送的值不产生跳变,且不能与当前状态间隔太远)。
末端 SE3 控制:
| 序号 | 步骤 | 接口所属模块 | 接口类型 | 接口名称 | 备注 |
|---|---|---|---|---|---|
| 1 | 切换运动控制 Action 至带有 PLANNING_MOVE 后缀的模式 | 运动控制模块 | RPC | pb:/aimdk.protocol.McActionService/SetAction | Action 状态机切换见相应文档 |
| 2 | 调用末端 SE3 控制指令 | 运动控制模块 | RPC | pb:/aimdk.protocol.McMotionService/PlanningMove |
可参考 examples/mc/planning_move.py 示例。
关节弧度控制:
| 序号 | 步骤 | 接口所属模块 | 接口类型 | 接口名称 | 备注 |
|---|---|---|---|---|---|
| 1 | 关闭 motion_player | 无 | 在 ORIN 上执行aima em stop-app motion_player | 前置条件 | 如果 motion_player 处于开启状态且运控处于带有 JOINT_SERVO 后缀的状态,则 motion_player 会持续给手臂发送运动指令,导致上肢运动控制失效或干扰,严重时会导致手臂抖动甚至电机损坏 |
| 2 | 切换运动控制 Action 至带有 JOINT_SERVO 后缀的模式 | 运动控制模块 | RPC | pb:/aimdk.protocol.McActionService/SetAction | Action 状态机切换见相应文档 |
| 3 | 调用透传手臂控制指令 | 运动控制模块 | Channel | /motion/control/arm_joint_command | 持续传入双臂的关节弧度值,即可实现上肢运动控制,支持控制频率 20-100 Hz |
可参考 examples/mc/arm.py 示例。
场景三:机器人头部控制
Section titled “场景三:机器人头部控制”头部控制同时有 Channel 接口(/motion/control/neck_command)和 RPC 接口(pb:/aimdk.protocol.McMotionService/SetNeckCommand),这里以头部控制 RPC 接口为例,介绍头部控制的过程。
| 序号 | 步骤 | 接口所属模块 | 接口类型 | 接口名称 | 备注 |
|---|---|---|---|---|---|
| 1 | 关闭 motion_player | 无 | 在 ORIN 上执行aima em stop-app motion_player | 前置条件 | 如果 motion_player 处于开启状态且运控处于带有 JOINT_SERVO 后缀的状态,则 motion_player 会持续给头部发送运动指令,导致头部运动控制失效或干扰,严重时会导致头部抖动甚至电机损坏 |
| 2 | 调用机器人头部运动接口 | 运动控制模块 | RPC | pb:/aimdk.protocol.McMotionService/SetNeckCommand | 传入头部摇头和点头两个关节的弧度值,基础款仅有一个摇头关节可以控制 |
| 3 | 获取机器人头部运动状态(可选) | 运动控制模块 | RPC | pb:/aimdk.protocol.McDataService/GetNeckState |
RPC 接口可参考 examples/mc/set_neck_command.py 示例。Channel 接口可参考 examples/mc/neck.py 示例。
场景四:机器人灵巧手控制
Section titled “场景四:机器人灵巧手控制”同时有 Channel 接口和 RPC 接口,
| 序号 | 步骤 | 接口所属模块 | 接口类型 | 接口名称 | 备注 |
|---|---|---|---|---|---|
| 1 | 关闭 motion_player | 无 | 在 ORIN 上执行aima em stop-app motion_player | 前置条件 | 如果 motion_player 处于开启状态且运控处于带有 JOINT_SERVO 后缀的状态,则 motion_player 会持续给灵巧手发送运动指令,导致灵巧手运动控制失效或干扰,严重时会导致灵巧手抖动甚至电机损坏 |
| 2 | 调用机器人灵巧手运动接口 | 运动控制模块 | RPC | pb:/aimdk.protocol.McMotionService/SetHandCommand | 传入灵巧手五个关节的弧度值和力矩,控制逻辑为满足弧度或力矩其一运动即会停止 |
| 3 | 获取机器人灵巧手运动状态(可选) | 运动控制模块 | RPC | pb:/aimdk.protocol.McDataService/GetHandState |
RPC 接口可参考 examples/mc/set_hand_command.py 示例。Channel 接口可参考 examples/mc/hand.py 示例。
场景五:机器人播放预录制动作
Section titled “场景五:机器人播放预录制动作”预录制动作的播放接口有两个模块都有提供,分别是 动作播放模块 和 遥控模块,其中动作播放模块提供底层能力,其接口有暂停等较为复杂的控制,遥控模块基于动作播放模块的能力进行了一层封装,提供了更为简单的动作播放接口,仅能启动和复位。
以下以遥控模块为例,介绍预录制动作的播放过程。
| 序号 | 步骤 | 接口所属模块 | 接口类型 | 接口名称 | 备注 |
|---|---|---|---|---|---|
| 1 | 切换运动控制 Action 至带有 JOINT_SERVO 后缀的模式 | 运动控制模块 | RPC | pb:/aimdk.protocol.McActionService/SetAction | Action 状态机切换见相应文档 |
| 2 | 获取动作列表(可选,如果需要播放的动作 id 已知,则可以跳过该步骤) | 遥控模块 | RPC | pb:/aimdk.protocol.RcMotionPlayerService/GetMotionList | 从返回的动作列表中选择某个动作,使用其 id 作为下一步请求的输入 |
| 3 | 播放预录制动作 | 遥控模块 | RPC | pb:/aimdk.protocol.RcMotionPlayerService/PlayerMotion |
场景六:机器人播放预定义表情
Section titled “场景六:机器人播放预定义表情”| 序号 | 步骤 | 接口所属模块 | 接口类型 | 接口名称 | 备注 |
|---|---|---|---|---|---|
| 1 | 获取表情列表(可选,如果需要播放的表情 id 已知,则可以跳过该步骤) | 遥控模块 | RPC | pb:/aimdk.protocol.RcEmoticonPlayerService/GetEmotionList | 从返回的表情列表中选择某个表情,使用其 id 作为下一步请求的输入 |
| 2 | 播放表情 | 遥控模块 | RPC | pb:/aimdk.protocol.RcEmoticonPlayerService/PlayerEmotion |
场景七:获取机器人当前位置
Section titled “场景七:获取机器人当前位置”| 序号 | 步骤 | 接口所属模块 | 接口类型 | 接口名称 | 备注 |
|---|---|---|---|---|---|
| 1 | 在 AimMaster 上操作重定位成功 | 无 | 无 | 前置条件 | |
| 2 | 获取机器人当前位姿 | tf 模块 | Channel | \tf | 从 \tf 中获取 map 到 base_link 的变换,即可得到机器人的当前位姿 |
场景八:机器人导航至特定点
Section titled “场景八:机器人导航至特定点”| 序号 | 步骤 | 接口所属模块 | 接口类型 | 接口名称 | 备注 |
|---|---|---|---|---|---|
| 1 | 在 AimMaster 上操作建图、标记导航点 | 无 | 无 | 前置条件 | |
| 2 | 在 AimMaster 上重定位成功 | 无 | 无 | 前置条件 | |
| 3 | 获取当前地图 id(可选,如果当前地图 id 已知,则可以跳过该步骤) | 地图管理模块 | RPC | pb:/aimdk.protocol.MappingService/GetCurrentWorkingMap | 该接口会返回当前地图的 id,使用该 id 作为步骤 4 和 5 请求的输入 |
| 4 | 获取目标点 id(可选,如果目标点 id 已知,则可以跳过该步骤) | 地图管理模块 | RPC | pb:/aimdk.protocol.LocalizationService/GetTopoMsgs | 该接口会返回一个包含所有目标点的列表,选择一个目标点,使用其 id 作为步骤 5 请求的输入 |
| 5 | 设置导航目标点开始导航 | 规划控制模块 | RPC | pb:/aimdk.protocol.PncService/PlanningNaviToGoal | |
| 6 | 获取导航状态(可选) | 规划控制模块 | RPC | pb:/aimdk.protocol.PncService/ActionGetState | |
| 7 | 暂停或取消导航任务(可选) | 规划控制模块 | RPC | pb:/aimdk.protocol.PncService/ActionPause 或 pb:/aimdk.protocol.PncService/ActionCancel |
可以参考 examples/pnc/pnc_demo.py 示例。
场景九:调用机器人 tts 接口播放语音
Section titled “场景九:调用机器人 tts 接口播放语音”| 序号 | 步骤 | 接口所属模块 | 接口类型 | 接口名称 | 备注 |
|---|---|---|---|---|---|
| 1 | 调用 tts 接口播放语音 | 交互二次开发指南 | RPC | pb:/aimdk.protocol.TTSService/PlayTTS | 其中 text 填写需要播放的文本,priority_level 填写优先级,domain 填写调用方标识,trace_id 填写播报任务的 trace_id,is_interrupted 填写是否打断当前同优先级播报任务,一般为 true |
| 2 | 获取当前 tts 播报状态(可选) | 交互二次开发指南 | RPC | pb:/aimdk.protocol.TTSService/GetAudioStatus | 当状态从 Playing 变为 NotInQue 时,tts 播报结束 |
场景十:调用机器人音频文件播放接口
Section titled “场景十:调用机器人音频文件播放接口”| 序号 | 步骤 | 接口所属模块 | 接口类型 | 接口名称 | 备注 |
|---|---|---|---|---|---|
| 1 | 上传音频文件到 ORIN 的/agibot/data/var/interaction/audio/ 目录 | 无 | 无 | 前置条件 | audio文件只支持 pcm格式文件 小端16位 16kHz 单通道音频 |
| 2 | 调用音频文件播放接口 | 交互二次开发指南 | RPC | pb:/aimdk.protocol.TTSService/PlayMediaFile | 其中 file_name 填写上一步中上传的音频文件名,priority_level 填写优先级,domain 填写调用方标识,trace_id 填写播报任务的 trace_id,is_interrupted 填写是否打断当前同优先级播报任务,一般为 true |
| 3 | 获取当前音频文件播放状态(可选) | 交互二次开发指南 | RPC | pb:/aimdk.protocol.TTSService/GetAudioStatus | 当状态从 Playing 变为 NotInQue 时,音频文件播报结束 |
场景十一:获取机器人传感器(激光雷达、相机)数据
Section titled “场景十一:获取机器人传感器(激光雷达、相机)数据”传感器数据有一个专门的传感器数据模块,其中提供了激光雷达、相机等传感器数据的话题接口,还提供用于获取相机内参的 RPC 接口,这些接口无任何前置条件或接口组合,直接调用即可。
可参考 examples/hal_sensor/camera.py、examples/hal_sensor/lidar.py、examples/hal_sensor/get_intrinsics.py 示例。
场景十二:AimMaster 任务执行
Section titled “场景十二:AimMaster 任务执行”AimMaster 上可以创建和执行任务,其中创建的任务也可以调用任务执行引擎模块进行启动和控制等,任务执行引擎模块提供了任务执行引擎模块,提供了任务的启动、控制、查询等接口,具体接口可以参考相应文档。
| 序号 | 步骤 | 接口所属模块 | 接口类型 | 接口名称 | 备注 |
|---|---|---|---|---|---|
| 1 | 在 AimMaster 上将机器人调整为自动模式 | 无 | 无 | 前置条件 | |
| 2 | 在 AimMaster 上创建任务 | 无 | 无 | 前置条件 | |
| 3 | 调用任务执行引擎模块接口设置当前任务 | 任务执行引擎模块 | RPC | pb:/aimdk.protocol.TaskEngineService/SetCurrentTask | 需要传入对应任务的 id |
| 4 | 启动任务 | 任务执行引擎模块 | RPC | pb:/aimdk.protocol.TaskEngineService/LaunchTask | 需要传入对应任务的 id |
| 5 | 获取任务状态(可选) | 任务执行引擎模块 | RPC | pb:/aimdk.protocol.TaskEngineService/GetTask | 该接口会返回查询任务的执行状态,其中包含任务的 id、名称、状态、进度等信息 |