1. A2 旗舰款概述
1. A2 旗舰款概述
Section titled “1. A2 旗舰款概述”1.1 部件说明
Section titled “1.1 部件说明”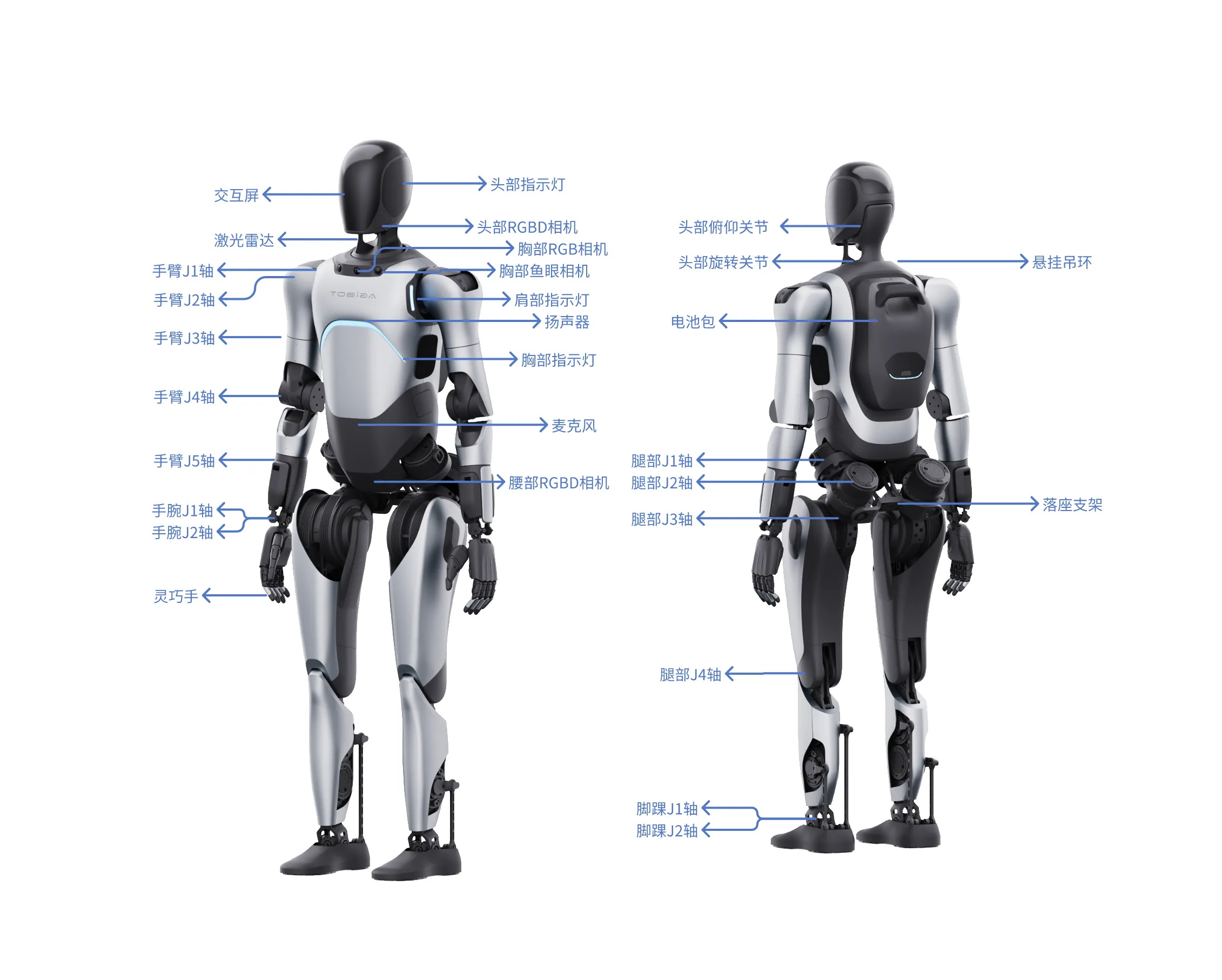
1.2 机器人规格参数
Section titled “1.2 机器人规格参数”| 一级分类 | 二级分类 | 条目 | 具体内容 |
|---|---|---|---|
| 产品基础信息 | 身高 | 169cm | |
| 尺寸 | 169(H)*75(W)*30(L)cm | ||
| 净重 | ≈69kg | ||
| 主动自由度 | 双臂7*2dof、双腿6*2dof、头部2dof、灵巧手6*2dof | ||
| 产品特性 | 电气性能 | 续航 | 整机力控站立+语音播报的续航时间:约3h机器在平整地面直腿行走的续航时间:约1.5h |
| 电池容量 | 14.4Ah | ||
| 充电时间 | 2h | ||
| 充电功率 | ≤500W | ||
| 充电电压 | 48V DC | ||
| 环境适应性 | 工作温湿度 | 0 ~ 40℃,相对湿度10% ~ 90%,无结露 | |
| 存储温湿度 | -20℃ ~ 70℃,相对湿度10% ~ 90%,无结露 | ||
| IP等级 | 关节模组:IP5X | ||
| 场地适应性 | 最小通过宽度 | 目前本体遥控通过最小宽度>1m,导航通过最小宽度>2m | |
| 最大越障高度 | 20mm | ||
| 最大运行坡度 | 8%(角度4.57度) | ||
| 安全性 | 手臂碰撞感知 | 支持 | |
| 最大避障感知距离 | 5m | ||
| 最小避障感知高度 | 30cm | ||
| 操作与交互 | 遥控操作 | 无线遥控器 | |
| 交互屏 | 面部交互屏具备表情显示功能 模块整体尺寸:105.50 × 67.20 × 3.0 mm(包括边框) 实际显示区域:95.04 × 53.86 mm 屏幕尺寸: 4.3 英寸 屏幕分辨率:800 × 480 像素 亮度:500 cd/m² 对比度:典型值 1500:1,最小值 1000:1 | ||
| 麦克风 | 阵列麦克风用于采集周围声音,用于语音交互,参数如下:灵敏度:-38dbv/Pa信噪比:65dB | ||
| 扬声器 | 双5W | ||
| 指示灯 | 多色彩氛围灯 | ||
| 产品能力 | 感知能力 | 环境感知 | 激光雷达:用于采集周围信息,用于建图导航,参数如下:量程:0.2 - 40 m @ 10% 反射率,0.2 - 70 m @ 80% 反射率FOV:H:360, V:-7~52测距误差:2 cm @ 10 mRGBD摄像头(头部)用于目标检测,参数如下:深度图分辨率:最高1280x720,640x480深度检测范围:0.3 ~ 10 mFOV:HFOV:65° ± 2°,VFOV:40° ± 1°RGB摄像头(胸部)用于目标检测,参数如下:FOV:H196V154分辨率:1920Hx1536VRGBD摄像头(裆部)用于目标检测,参数如下:深度图分辨率:640 x 400@5/10/15fps深度检测范围:常规能级模式 0.15-3m,高能级模式 0.15-5mFOV:HFOV:RGB FOV:16:9:H86° V55° 鱼眼相机(胸口左侧/右侧)用于前向感知,参数如下:FOV:H196V154分辨率:1920Hx1536 V |
| 导航能力 | 定位精度 | ±10cm , ±10° | |
| 导航避障 | 支持实时自主导航避障 | ||
| 移动能力 | 最大移动速度 | 1.2m/s | |
| 移动模式 | 支持前进、左转、右转 | ||
| 物联能力 | 通讯协议 | TCP、IP | |
| 通讯模块 | WiFi、蜂窝网络 | ||
| 手臂典型参数 | 灵巧手递送能力 | 抓握重量(手心向下):<3kg 勾握重量(手心向上):<8kg | |
| 整机(带灵巧手)手臂最大抓取重物 | 2kg | ||
| 末端线速度 | 1m/s | ||
| 手臂活动空间 | J1(Shoulder pitch): ±170° | ||
| J2(Shoulder roll): -30°~95° | |||
| J3(Shoulder yaw): ±170° | |||
| J4(Elbow pitch): -1°~118° | |||
| J5(Wrist roll): ±170° | |||
| J6(Wrist pitch): ±45° | |||
| J7(Wrist yaw): ±30° | |||
| 腿部典型参数 | 腿部活动空间(存在一定偏差) | J1(Hip roll):-37~40° | |
| J2(Hip yaw): ±75° | |||
| J3(Hip pitch): -50°~110° | |||
| J4(Knee pitch): -5°~140° | |||
| J5(Ankle pitch): -30°~52° | |||
| J6(Ankle roll): ±28° | |||
| 头部典型参数 | 头部活动空间 | 俯仰关节: ±23° | |
| 旋转关节: ±45° |
1.3 工控机规格参数
Section titled “1.3 工控机规格参数”A2 旗舰款机器人预装两块上位机开发板,两块开发板之间通过以太网直连通信,其中一块为小脑运控所在开发板,该开发板不允许二开;另一块为大脑开发板,使用 Nvidia Jetson AGX Orin 64 GB,规格参数可以查阅 Nvidia 官方说明。
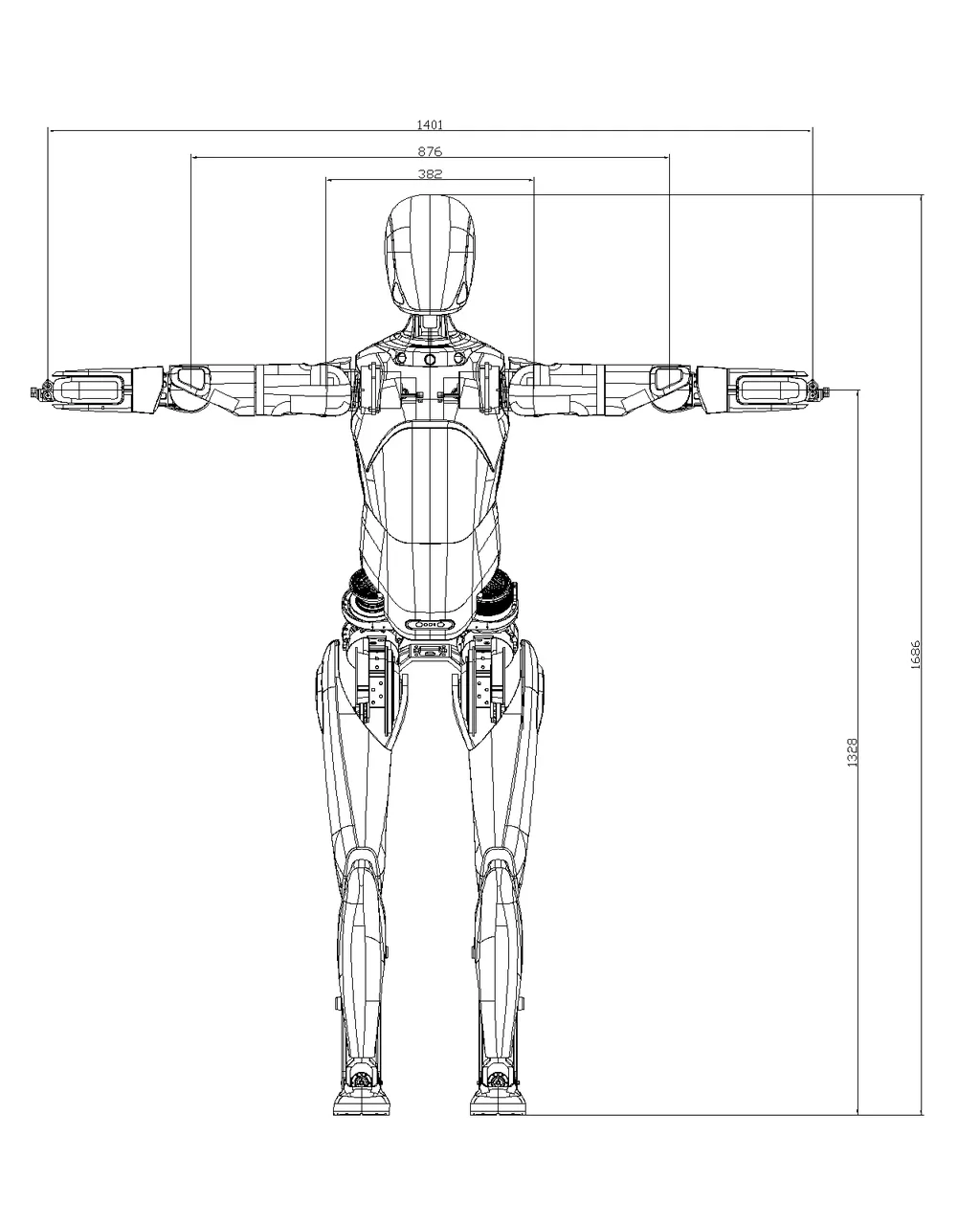
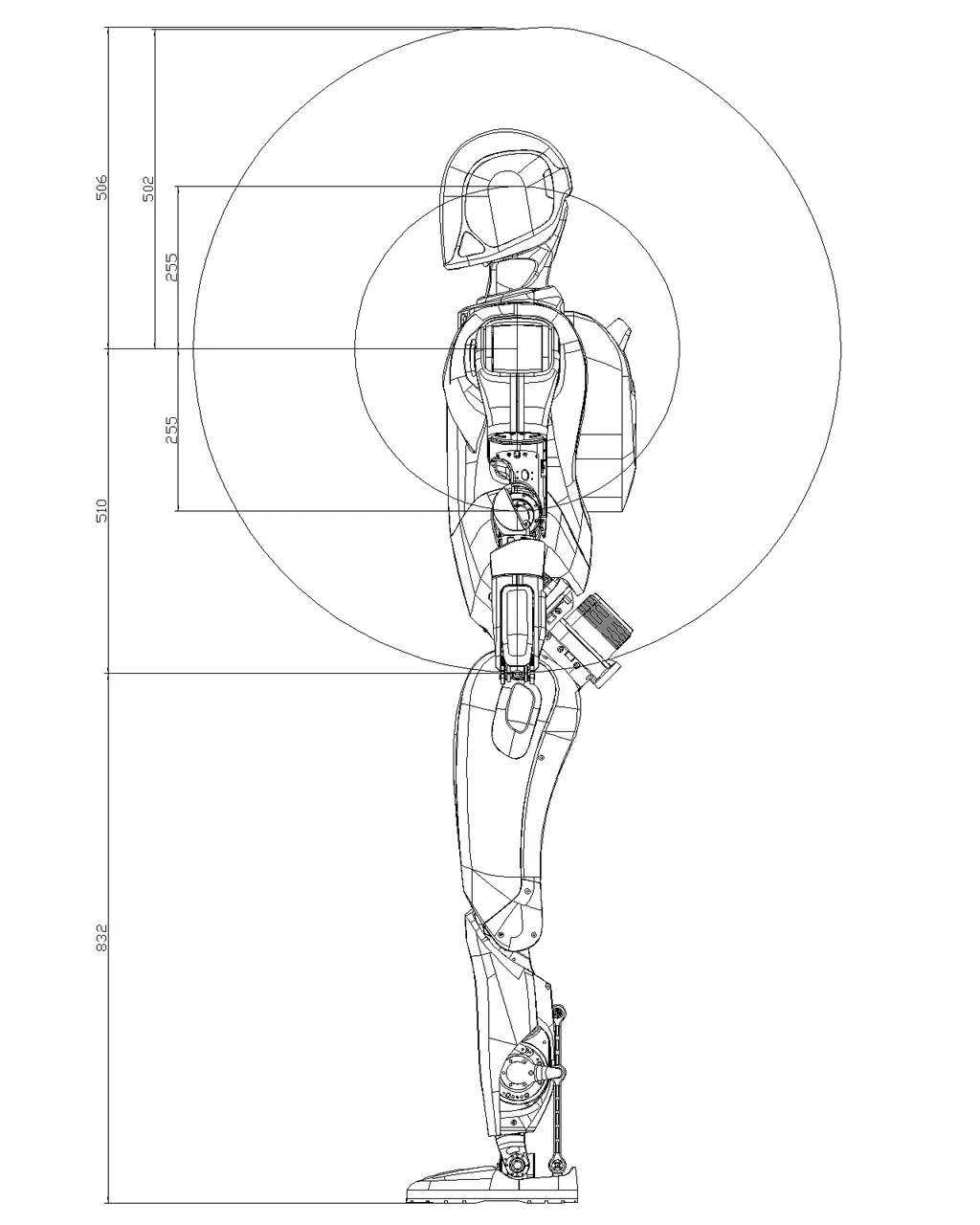
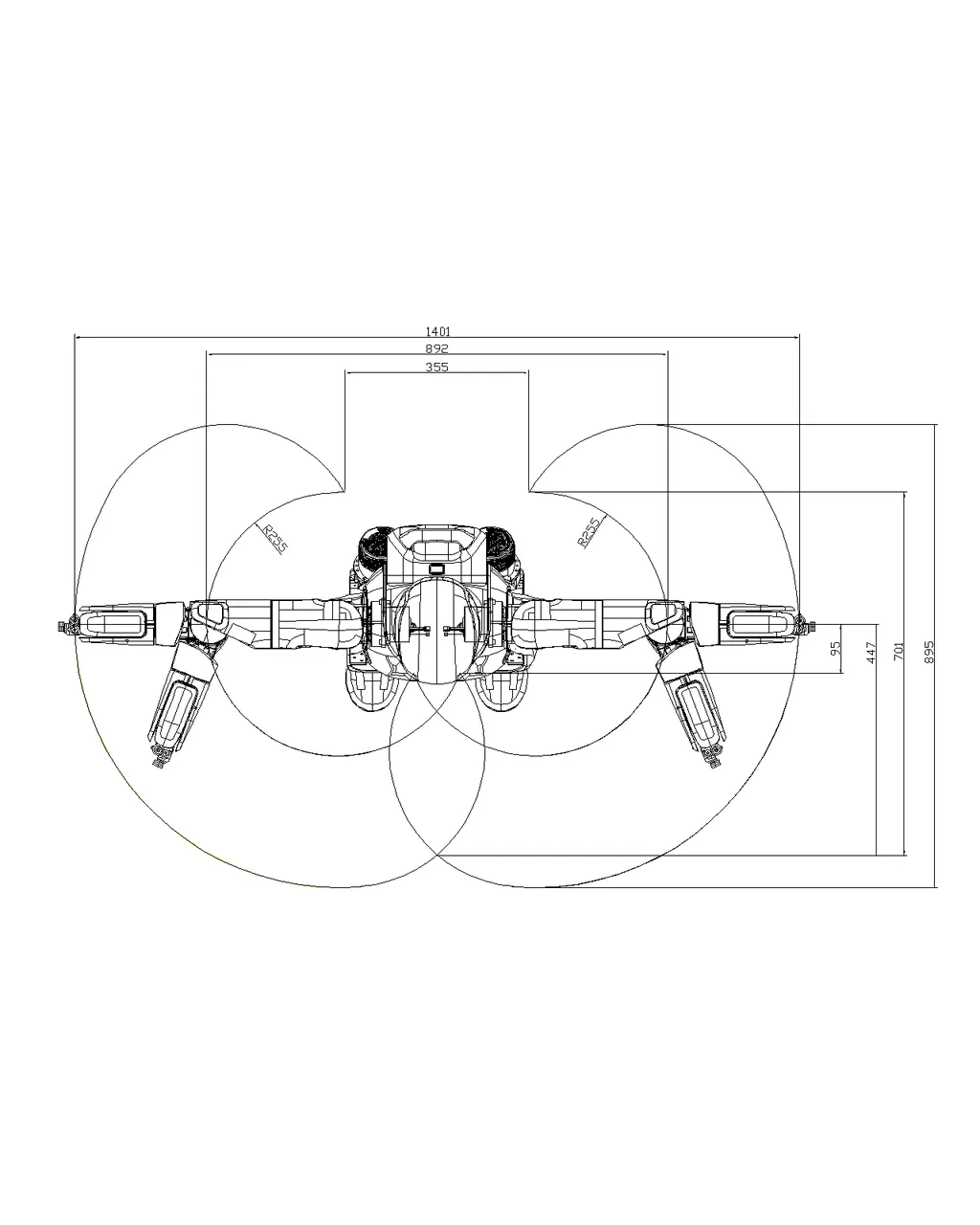
1.4 整机工作空间
Section titled “1.4 整机工作空间”以腕部关节中心点计算
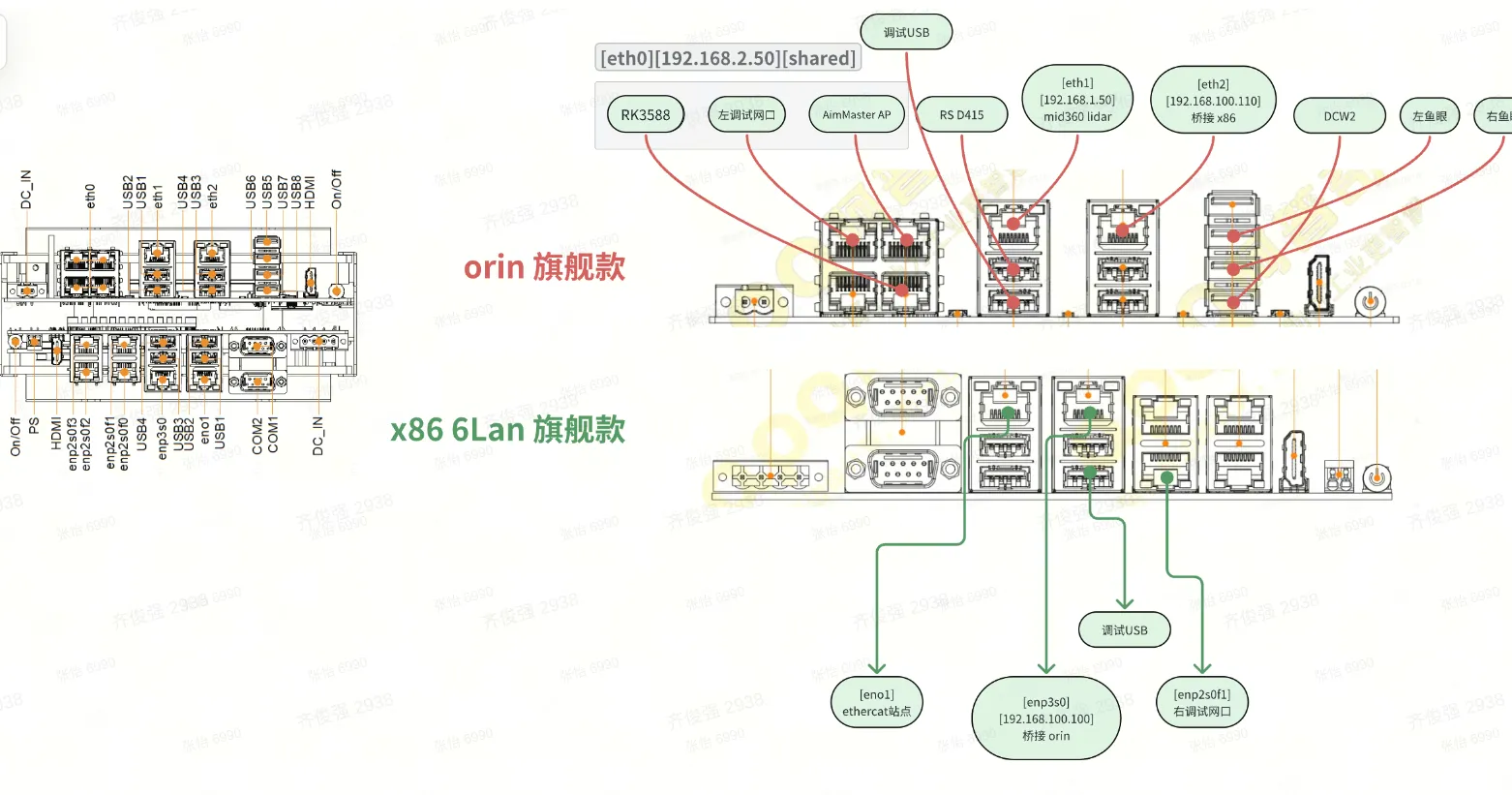
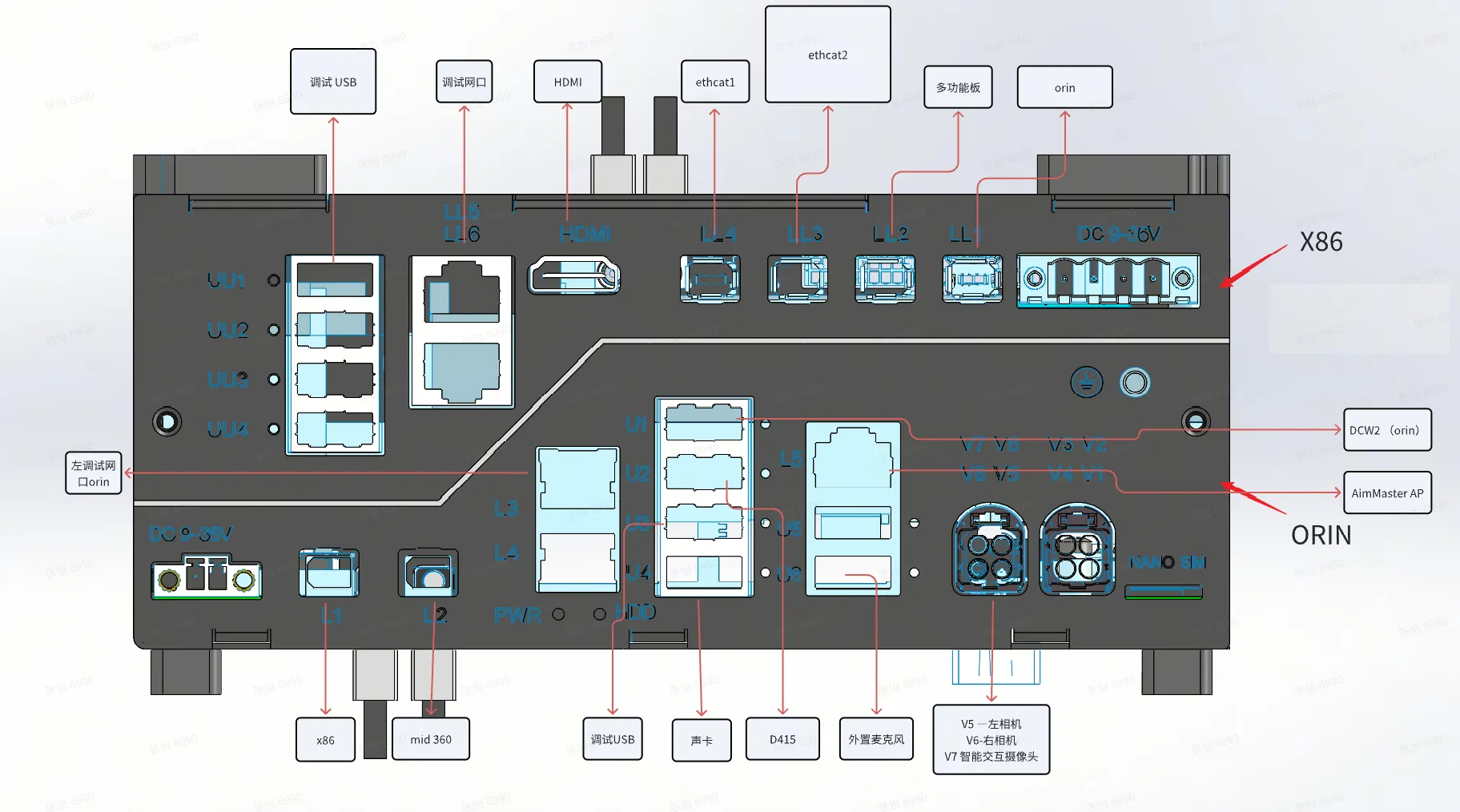
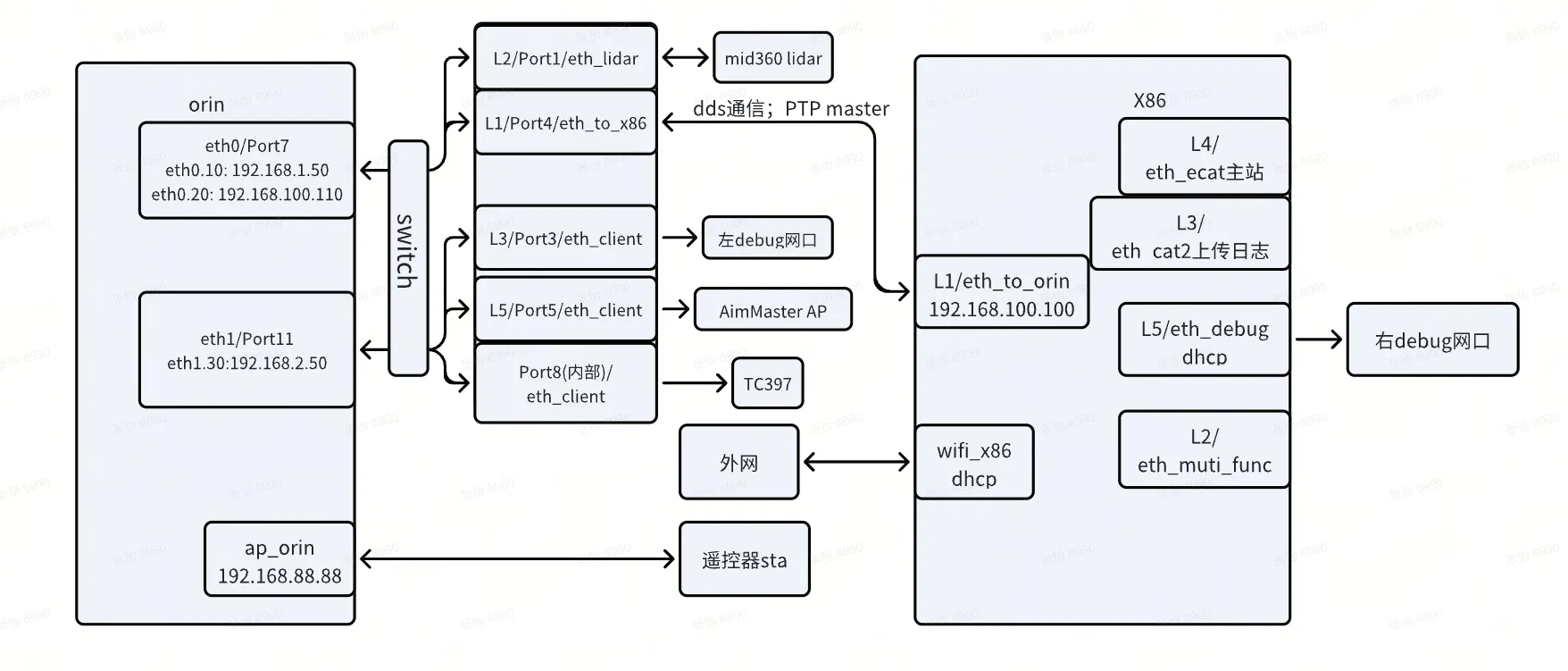
1.5 网络拓扑
Section titled “1.5 网络拓扑”A2 机器人有两种不同硬件机型,供应商和硬件设计有所不同,所以网络拓扑也有所不同,这里 称之为 T3 款和 P1 款。
实机可以通过 ip a 指令查看网卡名称来确定为哪一款。
1.5.1 T3 款
Section titled “1.5.1 T3 款”硬件架构框图
软件网络拓扑图
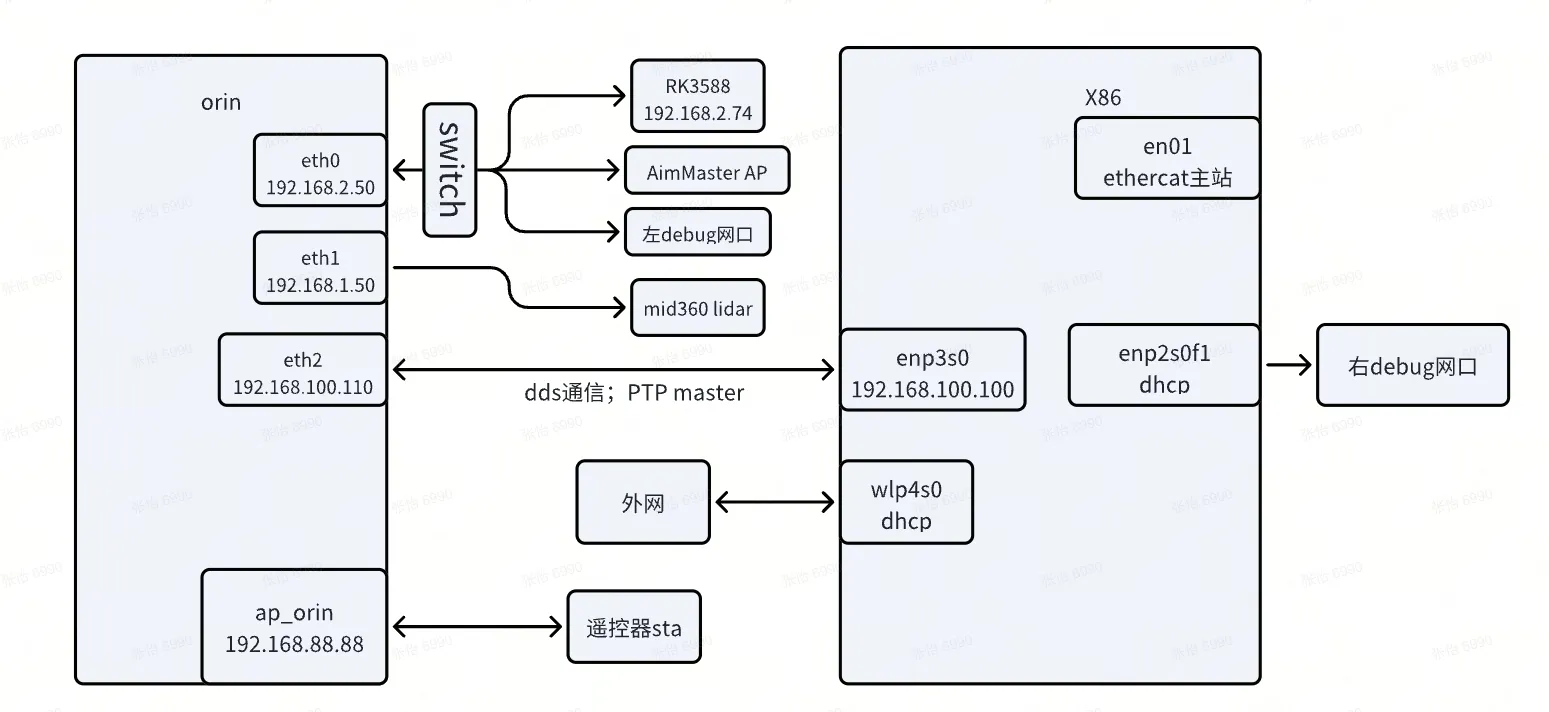
其中
- 左 debug 网口为 orin 调试网口,固定 ip 为 192.168.2.50,右 debug 网口为 x86 调试网口,使用 dhcp 模式。
1.5.2 P1 款
Section titled “1.5.2 P1 款”硬件架构图
软件网络拓扑图
其中
- 左 debug 网口为 orin 调试网口,固定 ip 为 192.168.2.50,右 debug 网口为 x86 调试网口,使用 dhcp 模式。
1.5.3 网络 NAT 配置
Section titled “1.5.3 网络 NAT 配置”自机上软件 V1.2 版本起,由于硬件和软件架构原因,机器人默认网络策略调整为 ORIN 自身 WiFi 禁用,转为使用 x86 WiFi NAT 上网,策略详情如下:
-
X86 WiFi 开启时,ORIN 模块上网默认走 192.168.100.1 网关流向 X86 NAT 上网。
-
X86 WiFi 关闭后,ORIN 对外上网流量默认走 5G 模块,此时若 5G 模块未插卡或无网络,则无法连接互联网
这样的网络策略随之带来了一个用户访问 ORIN 上服务无法直连的问题,为此我们提供了两种解决方案
-
可以通过连接 ORIN 的 AP 热点,默认密码可在 AimDK 包中查看 password.md 文件,此时可以直接访问 ORIN 热点 IP
-
可以通过在 X86 上配置端口转发,通过访问 X86 对应端口来转发到 ORIN 对应端口,相应配置文件位于 X86 上 /opt/orin_use_x86_wifi/x86_cfg.sh,其中转发条目示例如下(不同机型网卡名可能有所不同,但原理类似):
Terminal window sudo iptables -t nat -A PREROUTING -i wifi_x86 -p tcp --dport 51056 -j DNAT --to-destination 192.168.100.110:51056sudo iptables -t nat -A POSTROUTING -d 192.168.100.110 -p tcp --dport 51056 -j SNAT --to-source 192.168.100.100可以通过添加新的转发条目,修改转发端口和目标端口来支持更多端口转发。
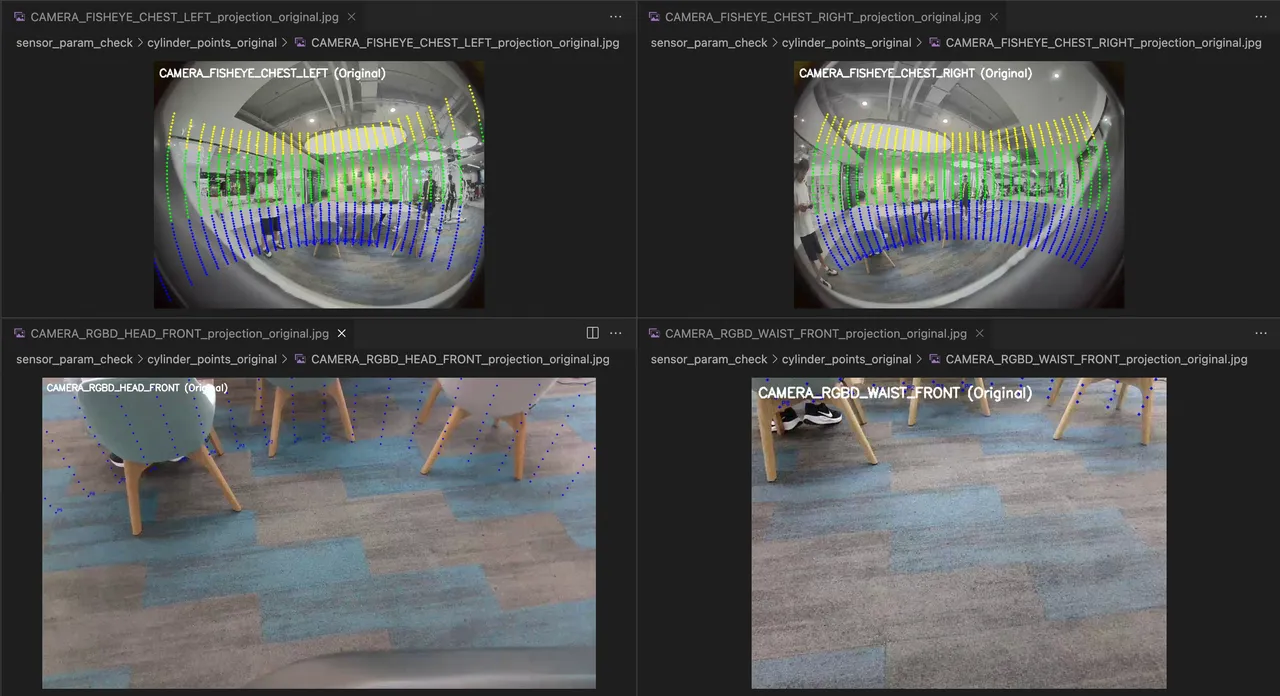
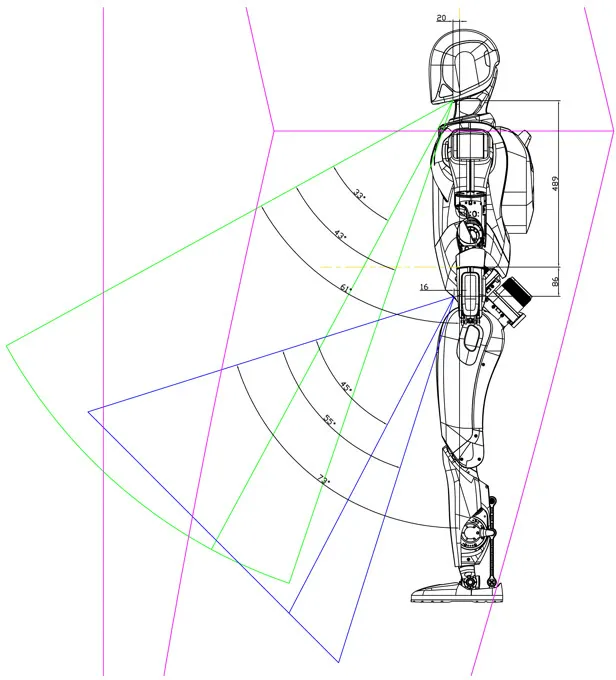
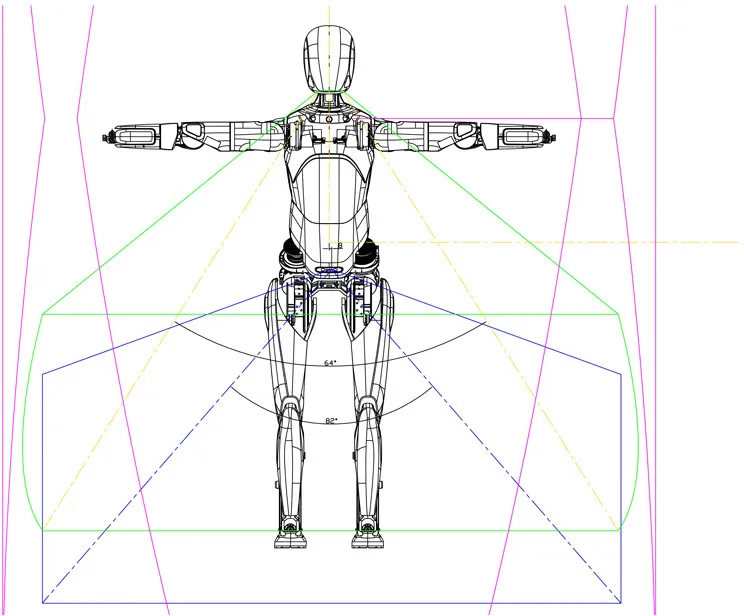
1.6 相机视角
Section titled “1.6 相机视角”A2 旗舰款头部和腰部搭载 RGB-D 相机,胸部搭载鱼眼相机,具体位置可以参考本文档概述中的部件说明。
-
FOV 示意图
侧视图下头部/腰部 RGB-D 相机 FOV 示意图:
正视图下头部/腰部 RGB-D 相机 FOV 示意图:
俯视图下头部/腰部 RGB-D 相机和胸部鱼眼相机的 FOV 示意图
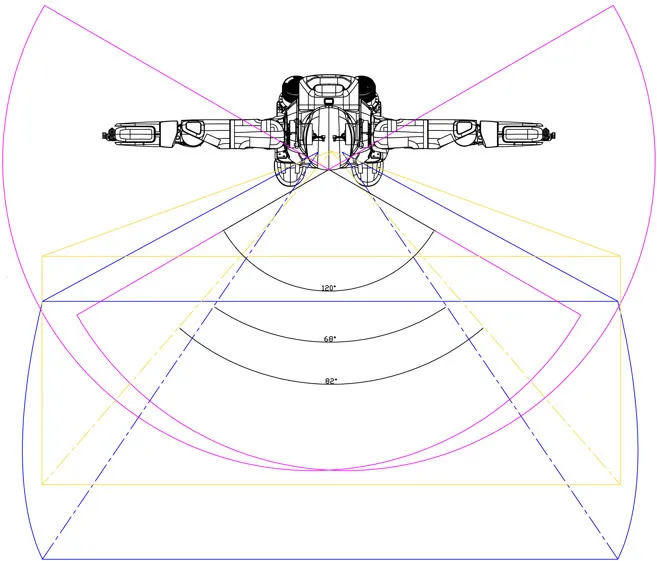
-
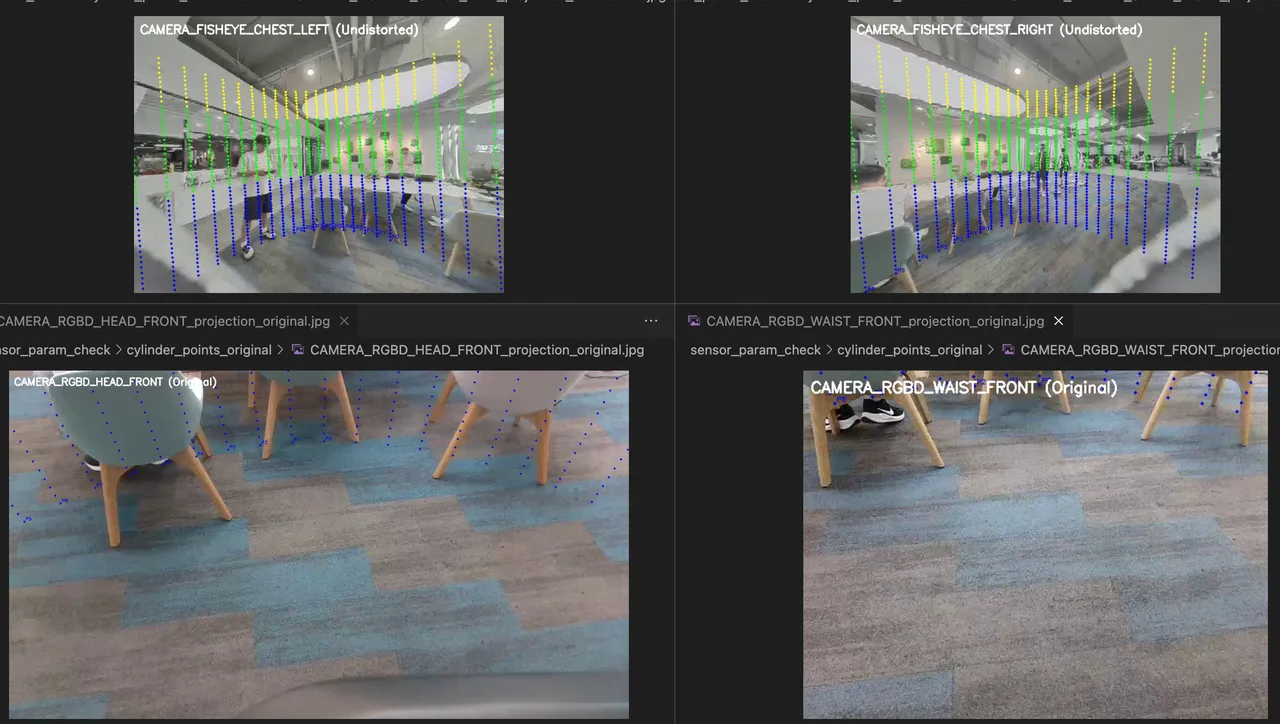
鱼眼相机去畸变 FOV 示意图
去畸变前鱼眼相机的 FOV 示意图:
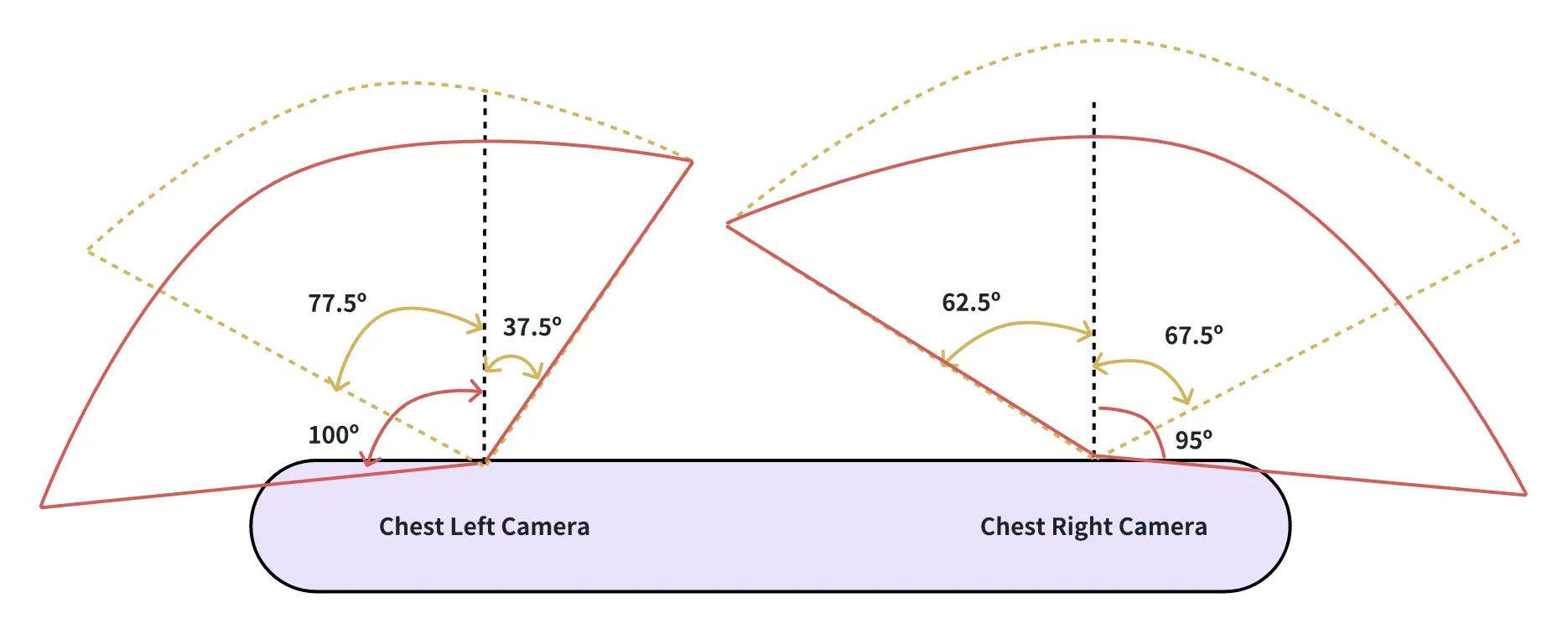
去畸变后鱼眼相机的 FOV 示意图,实际使用中鱼眼相机采用该示意图所表示的视场范围。
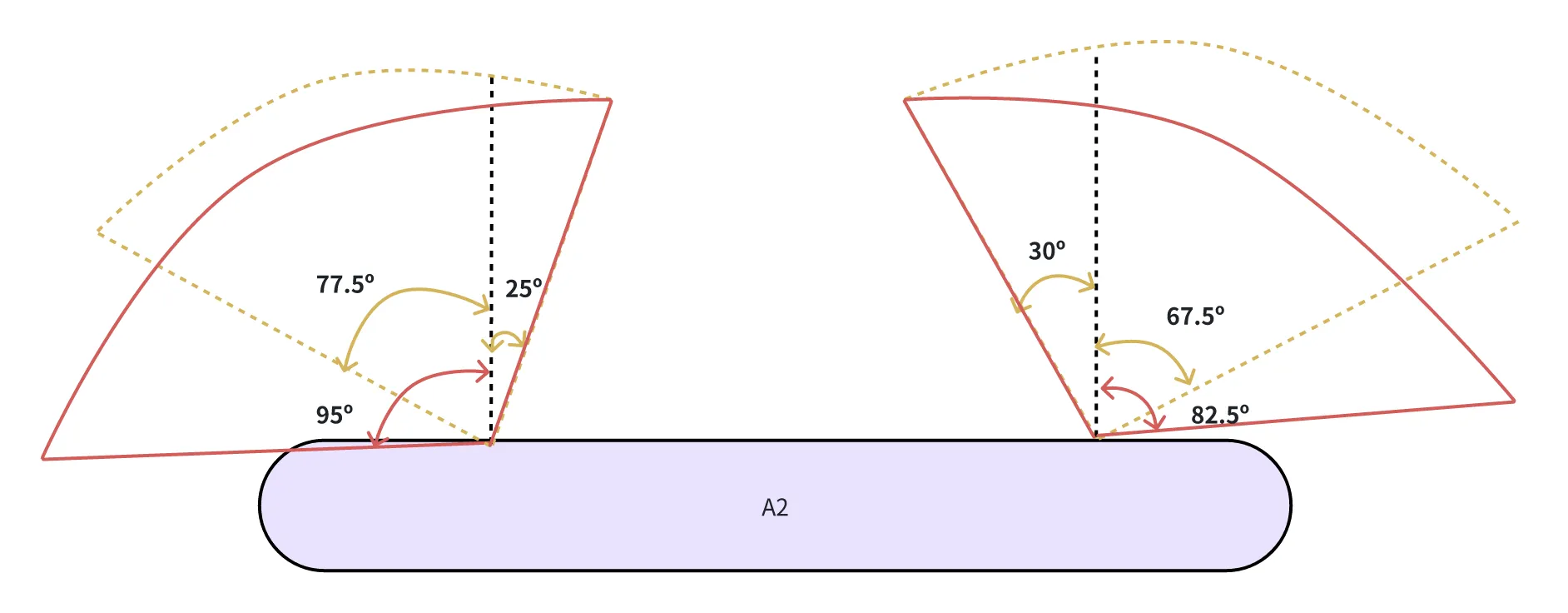
去畸变采取散点距离 Baselink = 2m,每个点纵向分辨率为 5cm,横向角度分辨率为 5 度。去畸变前后的效果对比如下图所示:
去畸变前 去畸变后