5. 二次开发程序部署
5. 二次开发程序部署
Section titled “5. 二次开发程序部署”二次开发程序一般推荐两种部署方式,分别为本体 ORIN 部署和三方工控机部署,本体 ORIN 部署硬件上较为简洁,适用于二开程序资源占用不大的情况,如需占用较多资源则需将 ORIN 上原有的部分程序关闭释放 CPU/GPU 等资源;三方工控机部署则需额外连线,一般需外挂连线配置,好处是原有机上软件程序功能都可以保留,同时又有相对充足的算力资源。
5.1 本体 ORIN 部署
Section titled “5.1 本体 ORIN 部署”推荐的程序部署目录为 /agibot/data/home/agi/Desktop,机上磁盘清理模块会定时清理空间,该文件夹为白名单文件夹不会被清理。
mkdir -p /agibot/data/home/agi/Desktop如遇权限问题,可考虑使用如下命令进行文件夹创建
sudo mkdir -p /agibot/data/home/agi/Desktopsudo chown -R agi:agi /agibot/data/home/agi5.1.1 Python 虚拟环境
Section titled “5.1.1 Python 虚拟环境”使用 Python 语言进行二次开发只需创建虚拟环境即可,可使用 conda/venv 等工具创建虚拟环境,其中 venv 为系统自带工具,conda 安装可以参考 miniconda 安装官方文档。
5.1.2 Docker 部署
Section titled “5.1.2 Docker 部署”使用 C++ 或其他编译型语言,或者需要安装或修改某些系统依赖,可以考虑使用 docker 进行部署。
docker 安装方式参考 https://docs.docker.com/engine/install/ubuntu/#install-from-a-package,请勿使用 apt 进行程序安装。
5.1.2.1 修改 docker 默认数据路径
Section titled “5.1.2.1 修改 docker 默认数据路径”docker 数据的默认路径 /var/lib/docker 的分区容量较小,需要将其默认数据存储路径修改为白名单路径。
-
移动默认存储路径
Terminal window # 停止 Docker 服务sudo systemctl stop docker# 移动默认存储路径(请先创建目标路径 /agibot/data/home/agi/Desktop)sudo mv /var/lib/docker /agibot/data/home/agi/Desktop -
修改配置文件
Terminal window # 修改 Docker 配置sudo vim /etc/docker/daemon.json在配置文件中添加:
{"data-root": "/agibot/data/home/agi/Desktop/docker"} -
重启docker:
Terminal window sudo systemctl start dockerdocker配置完毕。
5.1.2.2 容器内外 ROS2 通信设置
Section titled “5.1.2.2 容器内外 ROS2 通信设置”默认配置下,容器内无法正常与机上系统间进行 ROS2 通信,需要进行一定配置。
-
创建容器时将 ipc 通信和 net 通信与主机共享,添加如下选项
Terminal window --ipc=host --net=host -
在容器内使用与 ORIN 上相同的 agi 用户,uid 和 gid 均为 1001
Terminal window groupadd -g 1001 agi && useradd -u 1001 -g 1001 -m -s /bin/bash agi -
在容器内外使用相同的 dds 配置文件,将 ORIN 上的 /agibot/software/v0/entry/bin/cfg/ros_dds_configuration.xml 拷贝到容器中,在容器内执行 ROS2 程序或使用 ros2 命令前执行如下命令(其中 /path/to 需要替换为真实路径)
Terminal window source /opt/ros/humble/setup.bashexport ROS_DOMAIN_ID=232export ROS_LOCALHOST_ONLY=0export FASTRTPS_DEFAULT_PROFILES_FILE=/path/to/ros_dds_configuration.xml -
此时在容器内应该可以收到 ORIN 上发布的 ROS2 话题
Terminal window ros2 topic list
5.2 三方工控机部署
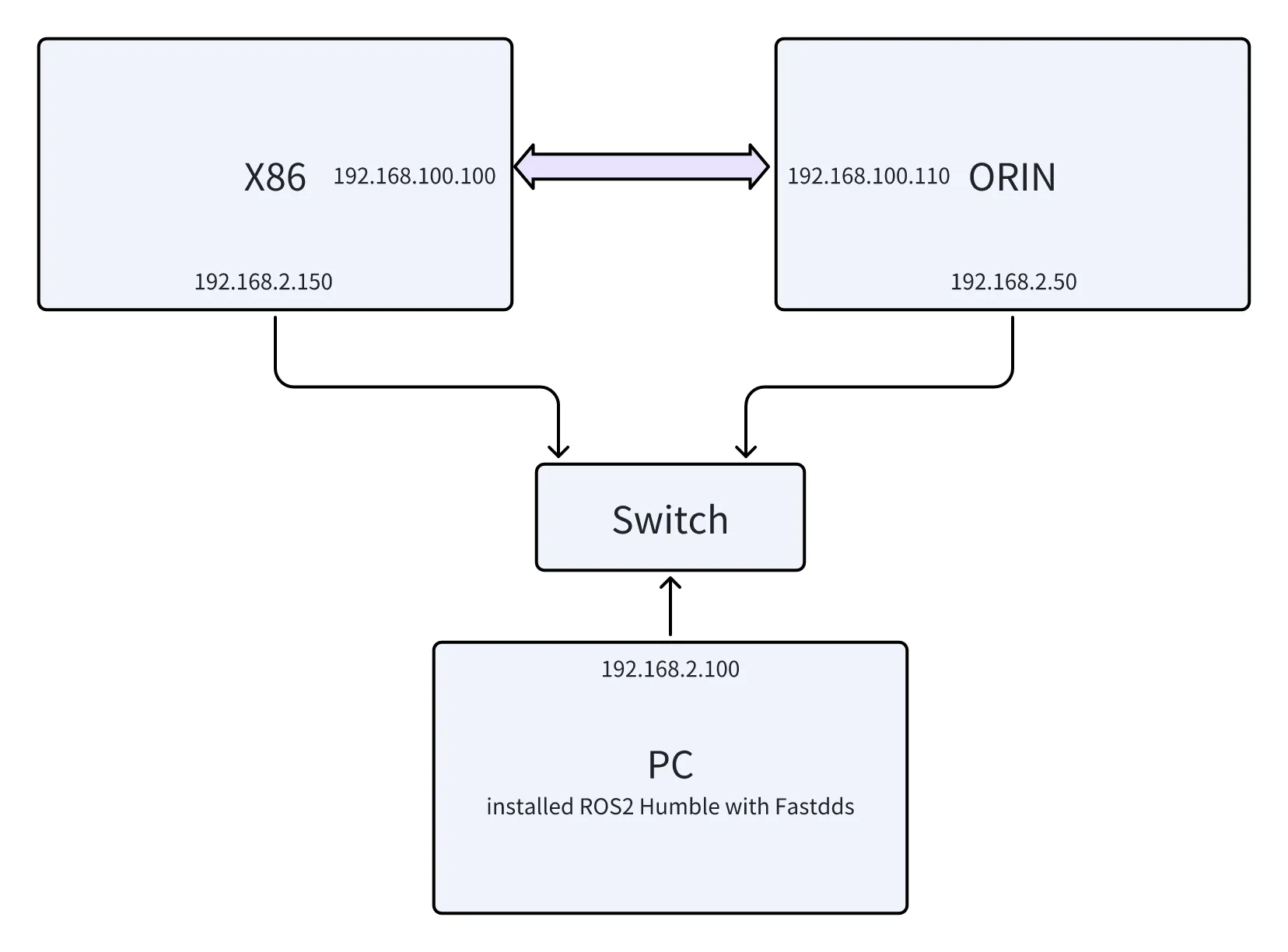
Section titled “5.2 三方工控机部署”推荐网络拓扑配置为:
-
修改 X86 调试网口为固定 IP 192.168.2.150,在
/etc/netplan/01-netcfg.yaml文件中修改 eth_debug 或 enp2s0f1 的为固定 IP 192.168.2.150。 -
修改 orin 和 x86 的 dds 配置文件
/agibot/software/v0/entry/bin/cfg/ros_dds_configuration.xml和/agibot/software/v0/entry/bin/cfg/privileged_ros_dds_configuration.xml,在 ORIN 的配置文件加上<address>192.168.2.50</address>,在 X86 的配置文件加上<address>192.168.2.150</address>,然后重启机器人。 -
将 PC 的有线网口设为固定 IP 192.168.2.100,在其上安装 ROS2 Humble with Fastdds,按照上图中连线,即可正确与机器人工控机进行 ROS2 通讯,注意运行 ROS2 程序前需要设置如下环境变量
Terminal window source /opt/ros/humble/setup.bashexport ROS_DOMAIN_ID=232export ROS_LOCALHOST_ONLY=0