自定义运控开发部署指南
1. 基于开发机做自定义运控模型训练
Section titled “1. 基于开发机做自定义运控模型训练”https://github.com/Link-U-OS/rl_training
注意,该训练代码仅进行了基本适配,奖励参数以及训练算法不保证可训练得到鲁棒、稳定的行走模型,仍需自行调整训练方法和奖励参数等。
后续版本会不断更新训练方法和参数等,力争提供一个可用的 baseline 行走算法。
2. 基于开发机做自定义运控仿真调试
Section titled “2. 基于开发机做自定义运控仿真调试”https://github.com/Link-U-OS/rl_deploy
可基于此部署框架在开发机进行 mujoco sim2sim 仿真调试,该部署框架可以直接部署到真机。
3. 基于A2本体与商业版软件做自定义运控模块部署
Section titled “3. 基于A2本体与商业版软件做自定义运控模块部署”本教程仅针对远征 A2 机器人 V1.3 版本系统,请通过 AimMaster 或 ssh 命令行连接确认机器人软件版本后再操作。
实机部署需要使用 xbox 系列手柄硬件,如罗技F710、北通、XBOX、飞智等。
3.1 机器人配置修改
Section titled “3.1 机器人配置修改”远征 A2 机器人机上软件系统已有自带运动控制模块,在部署新的运控系统之前需要将原本的运控模块关闭并修改 Hal 通信后端为 ROS2 以便新的运控系统与其通信。
请确保机器人开机且被吊起,处于安全状态再进行后续操作。
3.1.1 关闭自带运动控制模块
Section titled “3.1.1 关闭自带运动控制模块”修改 ORIN 上 /agibot/software/v0/entry/bin/cfg/sm.yaml,移除下图中 “mc”,
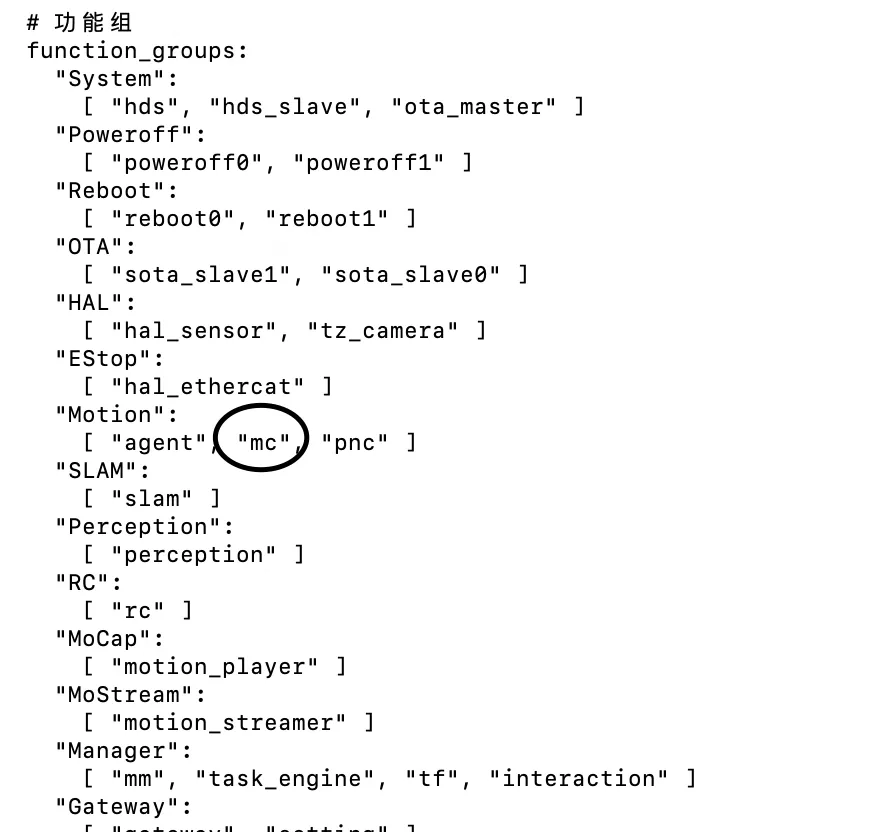
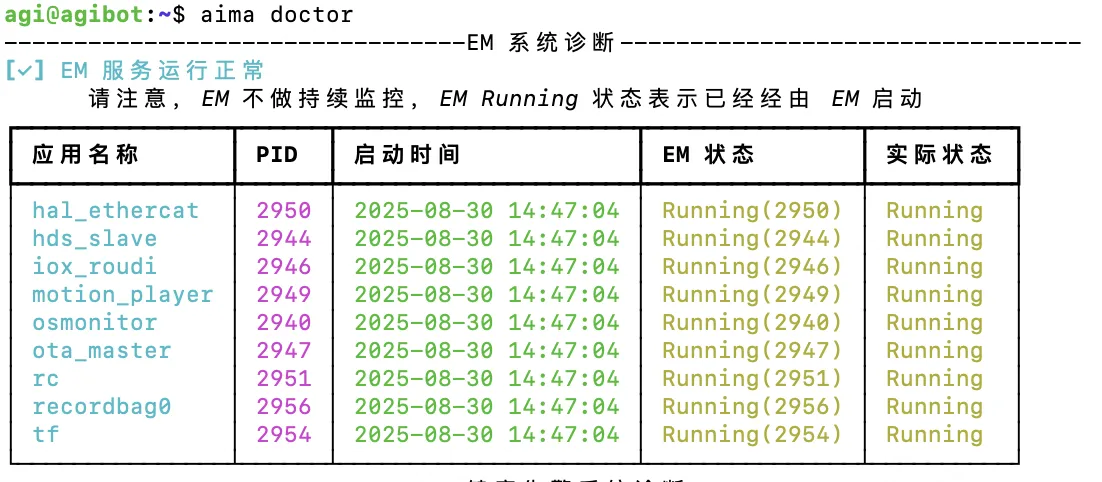
修改后重启机器人,等待机器人初始化完成后在 x86 上使用如下命令确认 mc 进程未启动
aima em doctor预期输出类似以下状态(无 MC):
3.1.2 修改 Hal Ethercat 通信后端【可选】
Section titled “3.1.2 修改 Hal Ethercat 通信后端【可选】”该步骤为可选步骤,如使用 Iceoryx 通信后端则无需进行该步骤,自 2026/01/23 日起,部署 SDK 和框架中默认通信修改均已修改为 Iceoryx 通信后端,无需进行此步骤。
修改 x86 上 /agibot/software/v0/config/hal_ethercat/hal_ethercat_t3d1_flagship_cfg.yaml
将其中箭头所指部分 iceoryx 修改为 ros2,共 4 处
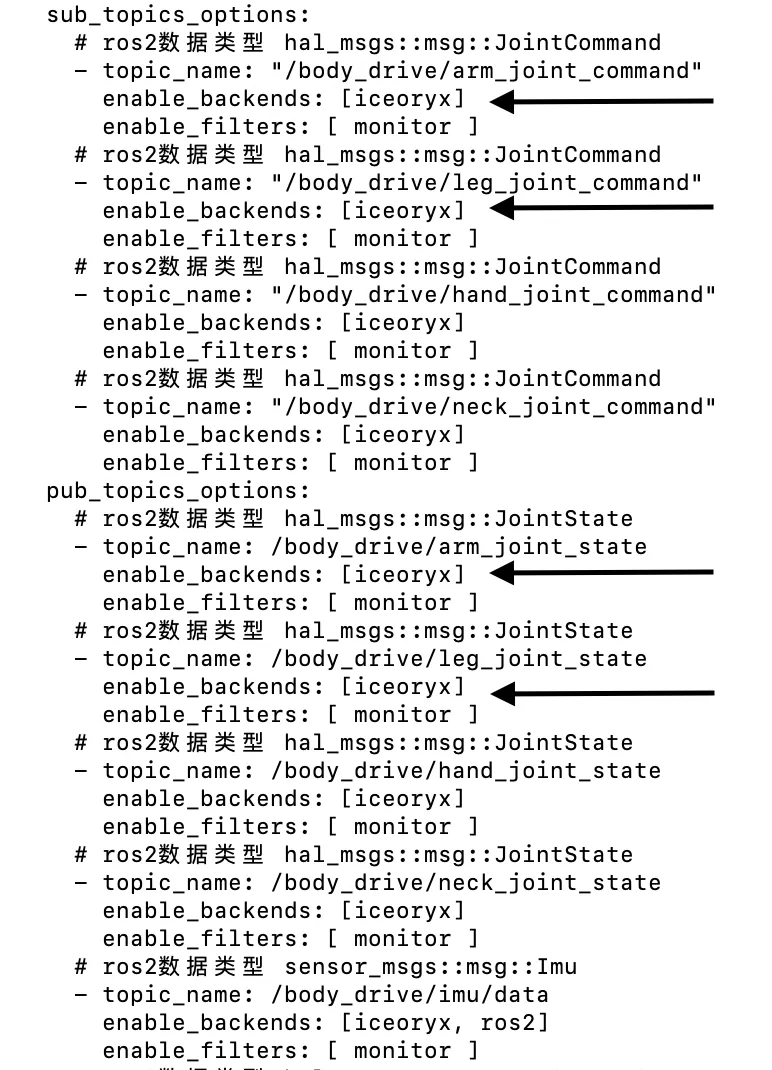
修改后可以在 x86 上使用以下命令重启 hal_ethercat 生效。
aima em stop-app hal_ethercataima em start-app hal_ethercat
hal_ethercat 关闭后机器人可能会误播报电池电量低并伴随有红色警报灯闪烁,无需惊慌,重启成功后告警会自动消失。
可以使用如下命令在 x86 上检查是否有对应 ros2 话题发布
ssh agi@192.168.100.110 # login to orin
aima topic hz /body_drive/leg_joint_state自 2026/01/23 日起,rl_deploy 仓库中提供了 python 版本 aimrl_sdk 用于 python 部署推理运控模型,请参考 aimrl_sdk 使用说明。以下教程将区分 python 版本和 C++ 版本两种部署方式。
3.2 docker 安装与镜像推送(仅 C++ 版本需要)
Section titled “3.2 docker 安装与镜像推送(仅 C++ 版本需要)”机器人 x86 和 ORIN 工控机环境均不允许修改,而 C++ 版本运控部署程序需要一些额外依赖,需要使用 docker 方式进行部署。
Python 版本部署不需要容器,可跳过本节,直接参考 3.3.2 与 3.5.2。
3.2.1 docker 安装
Section titled “3.2.1 docker 安装”只允许使用下载 deb 包的方式安装,参考教程:https://docs.docker.com/engine/install/ubuntu/#install-from-a-package。
-
在 x86 上创建 /agibot/data/home/agi/Desktop 目录,机上磁盘清理模块会定时清理空间,该文件夹为白名单文件夹不会被清理。
Terminal window mkdir -p /agibot/data/home/agi/Desktop -
docker 安装
在官方仓库中,下载deb文件(Docker Engine、CLI、containerd 和 Docker Compose 软件包的以下文件):
containerd.io_1.7.20-1_amd64.deb
docker-ce_28.0.0-1~ubuntu.22.04~jammy_amd64.deb
docker-ce-cli_28.0.0-1~ubuntu.22.04~jammy_amd64.deb
docker-buildx-plugin_0.21.0-1~ubuntu.22.04~jammy_amd64.deb
docker-compose-plugin_2.35.1-1~ubuntu.22.04~jammy_amd64.deb
将以上文件传输到 x86 上 /agibot/data/home/agi/Desktop 目录下 在该路径下执行:
Terminal window sudo dpkg -i ./containerd.io_1.7.20-1_amd64.deb \./docker-ce_28.0.0-1~ubuntu.22.04~jammy_amd64.deb \./docker-ce-cli_28.0.0-1~ubuntu.22.04~jammy_amd64.deb \./docker-buildx-plugin_0.21.0-1~ubuntu.22.04~jammy_amd64.deb \./docker-compose-plugin_2.35.1-1~ubuntu.22.04~jammy_amd64.deb -
将当前用户 agi 添加到 docker 组,并刷新用户组使变更立即生效
Terminal window sudo groupadd dockersudo usermod -aG docker $USERnewgrp docker -
修改 docker 默认存储路径 docker 默认存储路径为 /var/lib/docker,而 x86 根目录下磁盘分区空间较小,需修改默认存储路径
Terminal window # 停止 Docker 服务sudo systemctl stop docker# 移动默认存储路径sudo mv /var/lib/docker /agibot/data/home/agi/Desktop# 修改 Docker 配置sudo vim /etc/docker/daemon.json在配置文件中添加:
{"data-root": "/agibot/data/home/agi/Desktop/docker"}重启docker:
Terminal window sudo systemctl start dockerdocker配置完毕。
3.2.2 镜像推送
Section titled “3.2.2 镜像推送”首先在本地 PC 将镜像保存为一个压缩包(假定已完成前述仿真流程中的镜像构建步骤)
docker save -o a2-deploy-image.tar a2-deploy-image保存完成后使用如下命令推送到 x86 工控机上(IP 地址请改为真实的机器人 x86 工控机地址)
scp a2-deploy-image.tar agi@192.168.xxx.xxx:/agibot/data/home/agi/Desktop远程连接到机器人 x86 工控机上加载该镜像
docker load -i /agibot/data/home/agi/Desktop/a2-deploy-image.tar加载完成后运行 docker images 命令可以查看当前已加载到镜像列表。
3.3 程序上传并启动(C++ 容器 / Python 本机)
Section titled “3.3 程序上传并启动(C++ 容器 / Python 本机)”本节将分别给出 C++ 版本部署(Docker) 与 Python 版本部署(免容器) 的上传与启动方式。
3.3.1 C++ 版本:上传 deploy 并启动容器
Section titled “3.3.1 C++ 版本:上传 deploy 并启动容器”在本机 PC 进入部署仓库目录,执行以下命令上传程序到机器人 x86 工控机(IP 需替换)
rsync -avz --progress deploy agi@192.168.xxx.xxx:/agibot/data/home/agi/Desktop/ssh 连接机器人 x86 工控机,使用如下命令启动镜像
docker run -it \--name=a2_deploy \--privileged \--net=host \--ipc=host \--pid=host \-v /tmp:/tmp \-v /run/dbus/system_bus_socket:/run/dbus/system_bus_socket:ro \-v /agibot/data/home/agi/Desktop/deploy:/home/agi/deploy \-v /dev/input:/dev/input \-d a2-deploy-image检查底层状态数据是否发布(按通信后端选择一种方式)
- 默认 Iceoryx 后端(推荐/默认):无需 ROS2/DDS 环境变量。可在 ORIN 上通过
aima topic检查/body_drive/leg_joint_state是否有数据发布:
ssh agi@192.168.100.110 # login to orin
aima topic hz /body_drive/leg_joint_state- 若你在 3.1.2 手动将后端改为 ROS2:可在容器内通过
ros2 topic检查(此时才需要配置 DDS 相关环境变量):
# 进入容器docker start a2_deploy && docker exec -it a2_deploy /bin/bash
# 加载 ROS2 环境source /opt/ros/humble/setup.bashsource /home/agi/deploy/install/setup.bash
# 仅 ROS2 后端需要(可按实际情况调整/省略)export ROS_DOMAIN_ID=232export ROS_LOCALHOST_ONLY=0export FASTRTPS_DEFAULT_PROFILES_FILE=/home/agi/deploy/ros_dds_configuration.xml
ros2 topic list | grep body_driveros2 topic echo /body_drive/leg_joint_state3.3.2 Python 版本:上传 aimrl_sdk 并在 x86 上直接运行(免容器)
Section titled “3.3.2 Python 版本:上传 aimrl_sdk 并在 x86 上直接运行(免容器)”在本机 PC 进入部署仓库目录,执行以下命令上传 aimrl_sdk 到机器人 x86 工控机(IP 需替换)
rsync -avz --progress aimrl_sdk agi@192.168.xxx.xxx:/agibot/data/home/agi/Desktop/ssh 连接机器人 x86 工控机后,使用如下命令直接运行 aimrl_sdk 示例程序(无需 docker)
# 进入白名单目录(避免被磁盘清理)cd /agibot/data/home/agi/Desktop/aimrl_sdk
# 创建虚拟环境并安装 SDK (直接使用 whl 包安装)python3 -m venv .venvsource .venv/bin/activatepip install https://github.com/Link-U-OS/rl_deploy/releases/download/aimrl_sdk_v0.1.0/aimrl_sdk-0.1.0-cp310-cp310-linux_x86_64.whl
# 运行示例(可按需替换 --cfg 里的模型路径与参数)python examples/rl_deploy_basic.py --cfg examples/configs/agibot_a2_dof12.yaml --joystick /dev/input/js03.4 连接实体手柄控制器
Section titled “3.4 连接实体手柄控制器”实机启动后,需要使用手柄进行控制。只支持XBOX类型游戏手柄,如罗技F710、北通、XBOX、飞智等,接收器需插在机器人维护仓右侧 USB 调试口(连接到 x86 工控机)上。
接收器插入后,ssh 连接到 x86 工控机上查找 /dev/input/js0 文件,可以 cat /dev/input/js0 并按动手柄按键观察是否能接收到手柄输入。
另外还需要给运行程序的环境(容器内)对 /dev/input 下的设备设置一些权限,否则相关手柄读取程序可能无法访问设备信息。
sudo chmod 666 /dev/input/*3.5 启动部署框架
Section titled “3.5 启动部署框架”启动部署框架并进行调试前请务必保证机器人急停装置电量充足且随时可触发,机器人必须处于带保护状态。
3.5.1 C++ 版本:启动 ROS2 部署框架
Section titled “3.5.1 C++ 版本:启动 ROS2 部署框架”# 进入容器docker start a2_deploy && docker exec -it a2_deploy /bin/bash
# 启动部署框架cd /home/agi/deploy/install/deploy_assets/scripts./start_rl_control_real.sh3.5.2 Python 版本:启动 aimrl_sdk 示例程序(免容器)
Section titled “3.5.2 Python 版本:启动 aimrl_sdk 示例程序(免容器)”Python 版本部署推荐直接使用
aimrl_sdk/examples/rl_deploy_basic.py作为基线示例,并按需替换其中的 ONNX 模型与配置文件。更多参数说明请参考 aimrl_sdk 使用说明。
# 在 x86 上运行,无需进入容器cd /agibot/data/home/agi/Desktop/aimrl_sdk
# 首次运行:创建虚拟环境并安装 SDK (直接使用 whl 包安装)python3 -m venv .venvsource .venv/bin/activatepip install https://github.com/Link-U-OS/rl_deploy/releases/download/aimrl_sdk_v0.1.0/aimrl_sdk-0.1.0-cp310-cp310-linux_x86_64.whl
# 运行示例(可按需替换 --cfg 里的模型路径与参数)python examples/rl_deploy_basic.py --cfg examples/configs/agibot_a2_dof12.yaml --joystick /dev/input/js03.6 手柄操作逻辑
Section titled “3.6 手柄操作逻辑”请详细阅读以下内容,确保理解手柄操作逻辑后再上实机运行。
3.6.1 手柄操作流程
Section titled “3.6.1 手柄操作流程”操作前,请确保机器人急停手柄电量充足且可以随时被按下
- 按下手柄“start”键机器人进入启动模式
- 机上的运行终端(容器内或 x86 本机),应显示“start control”字样

- 同时按下手柄“LB”和“A”键机器人进入位控模式
- 机上的运行终端(容器内或 x86 本机),应显示“lie2stand”字样

此时放下机器人,确保机器人双脚落地,搀扶机器人使其保持平衡,确保吊绳松弛
- 按下手柄“X”键机器人进入运控模式
- 机上的运行终端(容器内或 x86 本机),应显示“stand2walk”字样

此时确保机器人急停手柄电量充足且可以随时被按下,并确认机器人周边环境安全
- 按下手柄“LB”键使能控制摇杆,两个摇杆可发出控制指令
- 红色箭头对应摇杆方向控制前进后退
- 绿色箭头对应摇杆方向控制左右横移
- 蓝色箭头对应摇杆方向控制左右转向

- 按下手柄“Y”键(绿色圈出),吊起机器人后按下手柄“start”键(蓝色圈出),结束机器人控制

3.6.2 手柄按键逻辑
Section titled “3.6.2 手柄按键逻辑”- “start”键:切换机器人进入或退出启动模式
- 启动模式:各关节位控,此时Kp很小,机器人应显性的表现为腿部臂部关节受很小的力,可以被扳动但会感受到阻力;机上的运行终端(容器内或 x86 本机),应显示“start control”字样
- 退出启动模式:此时机器人腿部臂部关节不受力,终端显示“stop control”字样
- “LB”和“A”键:切换机器人进入或退出位控模式
- 进入运控模式:机器人应显性的表现为腿部臂部关节受力,可以被小幅度扳动但会感受到阻力;机上的运行终端(容器内或 x86 本机),应显示“lie2stand”字样
- 退出运控模式:机器人回到启动模式,终端显示“stand2lie”字样
- “X”键:切换机器人进入运控模式
- 机器人可以自主站立;机上的运行终端(容器内或 x86 本机),应显示“stand2walk”字样
- “Y”键:切换机器人退出运控模式
- 机器人回到位控模式,终端显示“walk2stand”字样
- “LB”键:使能控制摇杆
- 该按键被按下时,手柄的两个摇杆才可以发出控制指令