A2 机器人出厂预搭载了运动控制程序,用户只需发送高层线速度和角速度指令即可直接控制机器人行走,无需开发行走等功能的底层控制模型,同时上肢、脖子等关节接口开放了直通 HAL 层的硬件接口。
默认情况下不开放下肢关节电机的底层控制接口,仅能通过高层速度指令进行整体控制,如需自行开发运动控制算法替换智元出厂自带算法,请参考文档中的 A2 旗舰款底层运控开发指南。替换前请务必阅读运控开发风险提示与安全注意事项。
智元运控程序内部设计了状态机,在不同状态下会切换不同的模型,同时开放不同的上肢控制接口等。状态机如下图所示:
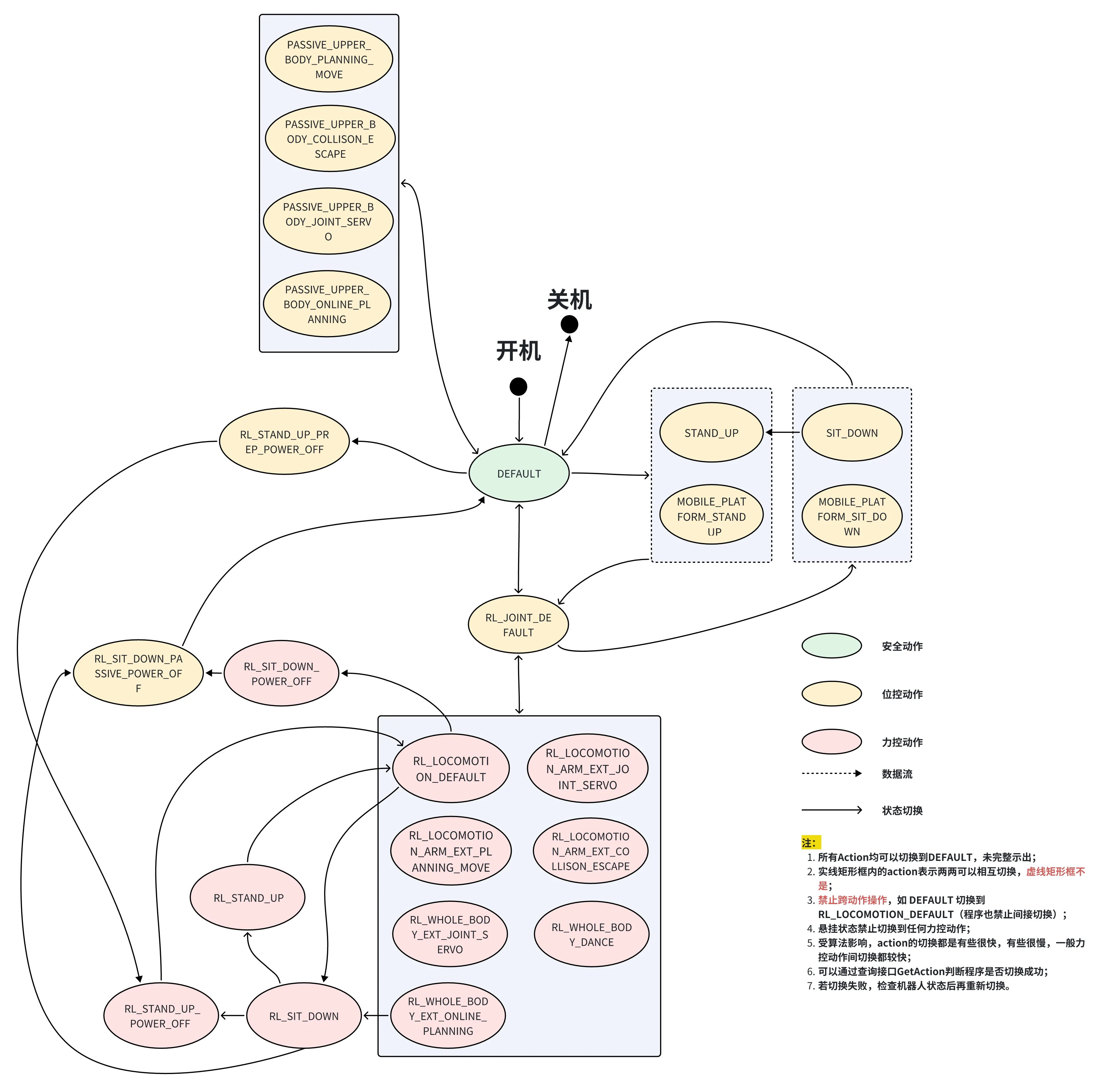
对于各个状态说明如下:
| Action 类型 |
Action 代码 |
中文名称 |
详细说明 |
可调用的控制接口 |
| 安全 Action |
DEFAULT |
默认模式 |
运控启动之后的默认 action |
|
| 位控 Action |
RL_JOINT_DEFAULT |
强化位控站立模式 |
上机器人强化位控站立,直腿站立 |
|
| 位控 Action |
PASSIVE_UPPER_BODY_JOINT_SERVO |
下肢被动上肢伺服模式 |
下肢不使能,手臂可以接收外部关节伺服指令 |
- /motion/control/arm_joint_command
- /motion/control/neck_joint_command
- /motion/control/hand_joint_command
|
| 位控 Action |
PASSIVE_UPPER_BODY_PLANNING_MOVE |
下肢被动上肢RRT规划模式 |
下肢不使能,上肢路径规划,rpc接收目标关节角或SE3位置 |
|
| 位控 Action |
PASSIVE_UPPER_BODY_COLLISON_ESCAPE |
下肢被动上肢躲避碰撞模式 |
下肢不使能,上肢躲避自碰撞,可在发生碰撞后无法调用规划接口时使用,切到该action后可以自动分开 |
|
| 位控 Action |
PASSIVE_UPPER_BODY_ONLINE_PLANNING |
下肢被动上肢NMPC规划模式 |
下肢不使能,上肢路径规划,rpc接收目标关节角或SE3位置,可中断当前目标 |
|
| 位控 Action |
SIT_DOWN |
位控坐下模式 |
下肢动作,上肢保持不动,配合椅子实现坐下 |
|
| 位控 Action |
STAND_UP |
位控站起模式 |
下肢动作,上肢保持不动,配合椅子实现站起 |
|
| 位控 Action |
MOBILE_PLATFORM_STAND_UP |
移动平台位控站起模式 |
下肢动作,上肢保持不动 |
|
| 位控 Action |
MOBILE_PLATFORM_SIT_DOWN |
移动平台位控坐下模式 |
下肢动作,上肢保持不动 |
|
| 位控 Action |
RL_SIT_DOWN_PASSIVE_POWER_OFF |
强化深坐坐下后辅助靠在椅背上 |
下肢动作,上肢保持不动,实验性功能不建议使用 |
|
| 位控 Action |
RL_STAND_UP_PREP_POWER_OFF |
强化深坐站起前辅助到达初始姿态 |
下肢动作,上肢保持不动,实验性功能不建议使用 |
|
| 力控 Action |
RL_LOCOMOTION_DEFAULT |
强化行走模式 |
强化学习训练的拟人行走模式,走路时手臂会摆动 |
- /motion/control/locomotion_velocity
|
| 力控 Action |
RL_LOCOMOTION_ARM_EXT_JOINT_SERVO |
强化行走上肢伺服模式 |
下肢拟人行走或站立,上肢接受外部关节伺服指令,行走或站立时做动作(使用全身控制的强化模型,更具有稳定性) |
- /motion/control/locomotion_velocity
- /motion/control/arm_joint_command
- /motion/control/neck_joint_command
- /motion/control/hand_joint_command
|
| 力控 Action |
RL_LOCOMOTION_ARM_EXT_PLANNING_MOVE |
强化站立上肢RRT规划模式 |
下肢力控站立,上肢路径规划,rpc接收目标关节角或SE3位置 |
- /motion/control/locomotion_velocity
- PlanningMove
|
| 力控 Action |
RL_LOCOMOTION_ARM_EXT_COLLISON_ESCAPE |
强化站立上肢躲避碰撞模式 |
下肢力控站立,上肢躲避自碰撞,可在发生碰撞后无法调用规划接口时使用,切到该action后可以自动分开 |
- /motion/control/locomotion_velocity
|
| 力控 Action |
RL_WHOLE_BODY_EXT_JOINT_SERVO |
全身动作上肢伺服模式 |
下肢力控站立,手臂可以接收外部关节伺服指令,额外可控制腰部动作,A2 机器人腰部无实际自由度,腰部动作是通过腿部电机配合实现 |
- /motion/control/locomotion_velocity
- /motion/control/arm_joint_command
- /motion/control/neck_joint_command
- /motion/control/hand_joint_command
- /motion/control/move_waist
- /motion/control/move_waist_lift
- /motion/control/move_waist_pitch
- /motion/control/move_waist_twist
|
| 力控 Action |
RL_WHOLE_BODY_DANCE |
全身舞蹈模式 |
可运行指定的全身舞蹈动作 |
- SelectDanceType
- GetDanceTypeList
|
| 力控 Action |
RL_WHOLE_BODY_EXT_ONLINE_PLANNING |
强化站立上肢NMPC规划模式 |
下肢力控站立,上肢路径规划,rpc接收目标关节角或SE3位置,可中断当前目标 |
- /motion/control/locomotion_velocity
- /motion/control/move_waist
- /motion/control/move_waist_lift
- /motion/control/move_waist_pitch
- /motion/control/move_waist_twist
- PlanningMove
|
| 力控 Action |
RL_SIT_DOWN |
强化浅坐 |
下肢力控坐下,上肢保持不动,实验性功能不建议使用 |
|
| 力控 Action |
RL_STAND_UP |
强化浅坐站起 |
下肢力控站起,上肢保持不动,实验性功能不建议使用 |
|
| 力控 Action |
RL_SIT_DOWN_POWER_OFF |
强化深坐,需人辅助 |
下肢力控坐下,上肢保持不动,实验性功能不建议使用 |
|
| 力控 Action |
RL_STAND_UP_POWER_OFF |
强化深坐站起 |
下肢力控站起,上肢保持不动,实验性功能不建议使用 |
|
一般情况下不推荐使用程序进行力控之外的切换,仅推荐程序在各个力控状态下切换,其余切换因涉及机器人吊起放下等操作仅可手动操作。
控制类接口一般有 Action 要求,未注明 Action 要求的接口以及查询类接口一般无 Action 限制。
| 接口名 |
pb:/aimdk.protocol.McActionService/SetAction |
| 功能概述 |
切换运动控制状态机 |
| 接口类型 |
HTTP JSON RPC |
| URL |
http://192.168.100.100:56322/rpc/aimdk.protocol.McActionService/SetAction |
| 入参 |
{
"header": {
"timestamp": {
"seconds": 1763614279,
"nanos": 847810000,
"ms_since_epoch": 1763614279847
},
"control_source": "ControlSource_SAFE"
},
"command": {
"action": "McAction_USE_EXT_CMD",
"ext_action": "RL_LOCOMOTION_DEFAULT"
}
}
- action: 固定填写为 McAction_USE_EXT_CMD
- ext_action: 实际需要切换的运控 Action
|
| 出参 |
{
"header": {
"code": "0",
"msg": "called successfully.",
"timestamp": {
"seconds": "1763643079",
"nanos": 849593506,
"ms_since_epoch": "0"
},
"trace_id": "",
"domin": ""
},
"state": "CommonState_SUCCESS"
}
|
| 示例脚本 |
examples/mc/SetAction.py |
| 备注 |
- 异步接口,调用完成不代表切换即完成,需配合 GetAction 接口查询切换是否完成
- 本接口无 Action 限制
|
| 接口名 |
pb:/aimdk.protocol.McActionService/GetAction |
| 功能概述 |
查询运动控制状态机 |
| 接口类型 |
HTTP JSON RPC |
| URL |
http://192.168.100.100:56322/rpc/aimdk.protocol.McActionService/GetAction |
| 入参 |
{}
|
| 出参 |
{
"header": {
"code": "0",
"msg": "called successfully.",
"timestamp": {
"seconds": "1763643026",
"nanos": 8207141,
"ms_since_epoch": "0"
},
"trace_id": "",
"domin": ""
},
"info": {
"current_action": "McAction_RL_LOCOMOTION_ARM_EXT_JOINT_SERVO",
"ext_action": "",
"status": "McActionStatus_RUNNING"
}
}
- current_action: 当前运行的 Action
- ext_action: 扩展 Action,一般不使用
- status:Action 状态,一般不使用
|
| 示例脚本 |
example/mc/actions.py |
| 备注 |
|
一般上述两个接口会配合使用,如下代码示例
def ensure_action(action_name: str, retries=3, retry_interval=1.0, mc_ip: str = "127.0.0.1"):
if get_action(mc_ip) == action_name:
set_action(action_name, mc_ip)
time.sleep(0.1 if i == 0 else retry_interval)
print(f"Failed to set action: {e}")
| 接口名 |
/motion/control/locomotion_velocity |
| 功能概述 |
行走控制指令 |
| 接口类型 |
ROS2 Topic |
| 入参 |
{
"data": {
"mode": 0,
"forward_velocity": 0.1,
"lateral_velocity": 0.0,
"angular_velocity": 0.0
}
}
-
mode: 速度控制模式
- 0 用于遥控场景
- 1 用于导航模式,速度响应更快,0.05m/s 激活踏步,踏步后 500ms 内无速度指令会停止踏步
-
forward_velocity: 前进速度,RL_LOCOMOTION_DEFAULT 模式下范围 -0.3 到 1.2 m/s,其余模式 -0.4 到 0.6 m/s
-
lateral_velocity: 水平速度,RL_LOCOMOTION_DEFAULT 模式下范围 -0.25 到 0.25 m/s,其余模式 -0.3 到 0.3 m/s
-
angular_velocity: 旋转速度,RL_LOCOMOTION_DEFAULT 模式下范围 -1.0 到 1.0 rad/s,其余模式 -0.8 到 0.8 m/s
|
| 示例脚本 |
examples/mc/walk.py |
| 备注 |
-
受限于关节散热,1.0 m/s 及以上的速度持续长时间行走会造成电机过温,请注意尽量避免长时间操控机器人高速行走,高速行走时请密切关注相关告警,出现过温等电机异常时及时停止高速行走操作。
-
该消息的 ROS2 类型为 ros2_plugin_proto/msg/RosMsgWrapper,需要 source prebuilt/ros2_plugin_proto_aarch64/share/ros2_plugin_proto/local_setup.bash 后使用。
-
本接口有调用限制,仅可在以下 Action 调用,其中在 RL_LOCOMOTION_DEFAULT 下指令遵循效果较好,其他模式下指令速度范围较小
- RL_LOCOMOTION_DEFAULT
- RL_LOCOMOTION_ARM_EXT_JOINT_SERVO
- RL_LOCOMOTION_ARM_EXT_PLANNING_MOVE
- RL_LOCOMOTION_ARM_EXT_COLLISION_ESCAPE
- RL_WHOLE_BODY_EXT_ONLINE_PLANNING
- RL_WHOLE_BODY_EXT_JOINT_SERVO
|
| 接口名 |
/motion/control/move_waist |
| 功能概述 |
腰部控制指令,可同时控制所有自由度 |
| 接口类型 |
ROS2 Topic |
| 入参 |
{
"data": {
"x": 0.0,
"y": 0.0,
"z": -0.1,
"roll": 0.0,
"pitch": 0.0,
"yaw": 0.0
}
}
|
| 示例脚本 |
examples/mc/move_waist.py |
| 备注 |
|
| 接口名 |
/motion/control/move_waist_lift |
| 功能概述 |
腰部下蹲控制指令 |
| 接口类型 |
ROS2 Topic |
| 入参 |
{
"header": {
"timestamp": {
"seconds": 1763681490,
"nanos": 943287000,
"ms_since_epoch": 1763681490943
},
"control_source": "ControlSource_MANUAL"
},
"waist_lift_value": 0.0
}
- waist_lift_value: 腰部下蹲,范围 -0.25 到 0.00 m
|
| 示例脚本 |
examples/mc/move_waist_lift.py |
| 备注 |
|
| 接口名 |
/motion/control/move_waist_twist |
| 功能概述 |
腰部扭转(转身)控制指令 |
| 接口类型 |
ROS2 Topic |
| 入参 |
{
"header": {
"timestamp": {
"seconds": 1763681490,
"nanos": 943287000,
"ms_since_epoch": 1763681490943
},
"control_source": "ControlSource_MANUAL"
},
"waist_twist_value": 0.0
}
- waist_twist_value: 扭转角度,范围 -0.5236 到 0.5236 rad
|
| 示例脚本 |
examples/mc/move_waist_twist.py |
| 备注 |
|
| 接口名 |
/motion/control/move_waist_pitch |
| 功能概述 |
腰部俯身指令 |
| 接口类型 |
ROS2 Topic |
| 入参 |
{
"header": {
"timestamp": {
"seconds": 1763681490,
"nanos": 943287000,
"ms_since_epoch": 1763681490943
},
"control_source": "ControlSource_MANUAL"
},
"waist_pitch_value": 0.0
}
- waist_pitch_value: 俯身角度,范围 0 到 0.5236 rad,与下蹲有一定耦合关系,详细请查阅 /motion/control/move_waist 接口说明文档
|
| 示例脚本 |
examples/mc/move_waist_pitch.py |
| 备注 |
|
| 接口名 |
/motion/control/waist_state |
| 功能概述 |
腰部状态话题 |
| 接口类型 |
ROS2 Topic |
| 出参 |
{
"x": 0.0,
"y": 0.0,
"z": 0.0,
"roll": 0.0,
"pitch": 0.0,
"yaw": 0.0
}
- 各个字段含义可以参考 /motion/control/move_waist 接口的说明
|
| 示例脚本 |
examples/mc/waist_state.py |
| 备注 |
- 本接口无 Action 限制
- 该消息的 ROS2 类型为 ros2_plugin_proto/msg/RosMsgWrapper,需要 source prebuilt/ros2_plugin_proto_aarch64/share/ros2_plugin_proto/local_setup.bash 后使用
- 其中 RosMsgWrapper 中的 data 字段为序列化后的 pb 数据,类型为 McWaistValue,需要安装协议包 pip install prebuilt/a2_aimdk-1.3.0-py3-none-any.whl 进行安装
|
| 接口名 |
/motion/control/neck_joint_command |
| 功能概述 |
脖子控制指令 |
| 接口类型 |
ROS2 Topic |
| 入参 |
sensor_msgs::msg::JointState
- name:关节名称,固定填写为 ["idx27_head_joint1", "idx28_head_joint2"]
- position:关节角度,第一个值代表摇头自由度,范围 -0.785 到 0.785 rad,第二个值代表点头自由度,范围 -0.401 到 0.401 rad
- velocity: 无效字段,不填
- effort: 无效字段,不填
|
| 示例脚本 |
examples/mc/neck.py |
| 备注 |
|
| 接口名 |
/motion/control/neck_joint_state |
| 功能概述 |
脖子状态话题 |
| 接口类型 |
ROS2 Topic |
| 出参 |
sensor_msgs::msg::JointState
- position:关节角度,第一个值代表摇头自由度,范围 -0.785 到 0.785 rad,第二个值代表点头自由度,范围 -0.401 到 0.401 rad
|
| 示例脚本 |
examples/mc/joint_state.py |
| 备注 |
|
上述脖子控制话题接口适用于需要持续精确控制脖子角度,例如遥操作等场景,且仅可在 JOINT_SERVO 模式下调用,某些场景下仅需简单控制到特定角度,可以使用如下 RPC 接口
| 接口名 |
pb:/aimdk.protocol.McMotionService/SetNeckCommand |
| 功能概述 |
设置脖子命令 |
| 接口类型 |
HTTP JSON RPC |
| URL |
http://192.168.100.100:56322/rpc/aimdk.protocol.McMotionService/SetNeckCommand |
| 入参 |
{
"data": {
"shake": {
"name": "idx27_head_joint1",
"position": 0.5,
"velocity": 0.0,
"effort": 0.0
},
"nod": {
"name": "idx28_head_joint2",
"position": 0.0,
"velocity": 0.0,
"effort": 0.0
}
}
}
- 其中仅 shake 和 nod 中的 position 有意义,其余字段保持不变即可,shake 范围 -0.785 到 0.785 rad,nod 范围 -0.401 到 0.401 rad
|
| 出参 |
{
"header": {
"code": "0",
"msg": "called successfully.",
"timestamp": {
"seconds": "1762845079",
"nanos": 921954699,
"ms_since_epoch": "0"
},
"trace_id": "",
"domin": ""
},
"state": "CommonState_SUCCESS"
}
|
| 示例脚本 |
examples/mc/SetNeckCommand.py |
| 备注 |
- 本接口无 Action 限制
- 注意在 JOINT_SERVO 模式下该接口默认会被动作播放模块 motion_player 接管,请调用 examples/motion_player/disable_motion_player.sh 禁用后再发送指令
|
| 接口名 |
pb:/aimdk.protocol.McDataService/GetNeckState |
| 功能概述 |
获取脖子状态 |
| 接口类型 |
HTTP JSON RPC |
| URL |
http://192.168.100.100:56322/rpc/aimdk.protocol.McMotionService/GetNeckState |
| 入参 |
{}
|
| 出参 |
{
"header": {
"code": "0",
"msg": "called successfully.",
"timestamp": {
"seconds": "1762846182",
"nanos": 679221245,
"ms_since_epoch": "0"
},
"trace_id": "",
"domin": ""
},
"data": {
"shake": {
"name": "",
"sequence": 0,
"position": 0,
"velocity": 0,
"effort": 0
},
"nod": {
"name": "",
"sequence": 0,
"position": 0,
"velocity": 0,
"effort": 0
}
}
}
- 其中仅 shake 和 nod 中的 position 有意义,其余字段保持不变即可,shake 范围 -0.785 到 0.785 rad,nod 范围 -0.401 到 0.401 rad
|
| 示例脚本 |
examples/mc/GetNeckState.py |
| 备注 |
本接口无 Action 限制 |
| 接口名 |
/motion/control/hand_joint_command |
| 功能概述 |
手指控制指令 |
| 接口类型 |
ROS2 Topic |
| 入参 |
sensor_msgs::msg::JointState
- name:关节名称,固定填写为["L_thumb_swing_joint", "L_thumb_1_joint", "L_index_1_joint", "L_middle_1_joint", "L_ring_1_joint", "L_little_1_joint", "R_thumb_swing_joint", "R_thumb_1_joint", "R_index_1_joint", "R_middle_1_joint", "R_ring_1_joint", "R_little_1_joint"]
- position:关节角度,范围 0 到 2000,抽象值无单位,0 代表完全张开,2000 代表完全并拢
- velocity: 无效字段,不填
- effort: 关节力矩,范围 0 到 5700,0 代表对应推杆电机无力矩,5700 代表力矩达到最大 5.7N
|
| 示例脚本 |
examples/mc/hand.py |
| 备注 |
-
手指的控制逻辑是力矩和位置二者满足其一就会停止运动,例如针对某根手指传入 1000 的位置,5700 的力矩,如果没有外物卡住手指,当位置达到 1000 时,力矩不会继续加大,此时力矩会处于一个较小的值,如果外物卡住手指(抓住某物体等),力矩会持续加大到 5700 附近,对应电缸输出 5.7N 的力矩
-
注意在 JOINT_SERVO 模式下该接口默认会被动作播放模块 motion_player 接管,请调用 examples/motion_player/disable_motion_player.sh 禁用后再发送指令
-
本接口有调用限制,仅可在以下 Action 调用
- RL_LOCOMOTION_ARM_EXT_JOINT_SERVO
- RL_WHOLE_BODY_EXT_JOINT_SERVO
|
| 接口名 |
/motion/control/hand_joint_state |
| 功能概述 |
手指状态话题 |
| 接口类型 |
ROS2 Topic |
| 出参 |
sensor_msgs::msg::JointState
- name:各个手指的关节名称
- position:各个手指的关节角度,范围 0 到 2000
- velocity:无效字段
- effort:各个手指的力矩,范围 0 到 5700
|
| 示例脚本 |
examples/mc/joint_state.py |
| 备注 |
- 位置因零位影响,可能范围略微有所漂移,为正常现象
- 力矩因手指内的连杆机构、转轴、以及弹簧等级机构都会带来一些影响,可能会出现略小于 0 的负值(-1000 以内),为正常现象
- 手指受外力影响时同样会出现负值,为正常现象
- 本接口无 Action 限制
|
| 接口名 |
pb:/aimdk.protocol.McMotionService/SetHandCommand |
| 功能概述 |
设置手指命令 |
| 接口类型 |
HTTP JSON RPC |
| URL |
http://192.168.100.100:56322/rpc/aimdk.protocol.McMotionService/SetHandCommand |
| 入参 |
{
"data": {
"left": {
"agi_hand": {
"finger": {
"pos": {
"thumb_pos_0": 0,
"thumb_pos_1": 0,
"index_pos": 0,
"middle_pos": 1000,
"ring_pos": 1000,
"pinky_pos": 1000
},
"toq": {
"thumb_toq_0": 100,
"thumb_toq_1": 100,
"index_toq": 100,
"middle_toq": 100,
"ring_toq": 100,
"pinky_toq": 100
}
}
}
},
"right": {
"agi_hand": {
"finger": {
"pos": {
"thumb_pos_0": 0,
"thumb_pos_1": 1000,
"index_pos": 1000,
"middle_pos": 1000,
"ring_pos": 1000,
"pinky_pos": 1000
},
"toq": {
"thumb_toq_0": 100,
"thumb_toq_1": 100,
"index_toq": 100,
"middle_toq": 100,
"ring_toq": 100,
"pinky_toq": 100
}
}
}
}
}
}
- 位置范围 0 到 2000,力矩范围 0 到 5700
|
| 出参 |
{
"header": {
"code": "0",
"msg": "called successfully.",
"timestamp": {
"seconds": "1763696261",
"nanos": 18212539,
"ms_since_epoch": "0"
},
"trace_id": "",
"domin": ""
},
"state": "CommonState_SUCCESS"
}
|
| 示例脚本 |
examples/mc/SetHandCommand.py |
| 备注 |
- 本接口无 Action 限制
- 注意在 JOINT_SERVO 模式下该接口默认会被动作播放模块 motion_player 接管,请调用 examples/motion_player/disable_motion_player.sh 禁用后再发送指令
|
| 接口名 |
pb:/aimdk.protocol.McDataService/GetHandState |
| 功能概述 |
获取手指状态 |
| 接口类型 |
HTTP JSON RPC |
| URL |
http://192.168.100.100:56322/rpc/aimdk.protocol.McMotionService/GetHandState |
| 入参 |
{}
|
| 出参 |
{
"data": {
"left": {
"agi_hand": {
"finger": {
"pos": {
"thumb_pos_0": 500,
"thumb_pos_1": 1001,
"index_pos": 998,
"middle_pos": 998,
"ring_pos": 999,
"pinky_pos": 998
},
"toq": {
"thumb_toq_0": 0,
"thumb_toq_1": 0,
"index_toq": 0,
"middle_toq": 0,
"ring_toq": 0,
"pinky_toq": 0
}
}
}
},
"right": {
"agi_hand": {
"finger": {
"pos": {
"thumb_pos_0": 500,
"thumb_pos_1": 1000,
"index_pos": 998,
"middle_pos": 998,
"ring_pos": 999,
"pinky_pos": 998
},
"toq": {
"thumb_toq_0": 0,
"thumb_toq_1": 0,
"index_toq": 0,
"middle_toq": 0,
"ring_toq": 0,
"pinky_toq": 0
}
}
}
}
}
}
- 各个数值分别代表手指的位置和力矩,位置范围 0 到 2000,力矩范围 0 到 5700
|
| 示例脚本 |
examples/mc/GetHandState.py |
| 备注 |
- 位置因零位影响,可能范围略微有所漂移,为正常现象
- 力矩因手指内的连杆机构、转轴、以及弹簧等级机构都会带来一些影响,可能会出现略小于 0 的负值(-1000 以内),为正常现象
- 手指受外力影响时同样会出现负值,为正常现象
- 本接口无 Action 限制
|
| 接口名 |
/motion/control/arm_joint_command |
| 功能概述 |
手臂关节控制指令 |
| 接口类型 |
ROS2 Topic |
| 入参 |
sensor_msgs::msg::JointState
- name:关节名称,固定填写为["idx13_left_arm_joint1", "idx14_left_arm_joint2", "idx15_left_arm_joint3", "idx16_left_arm_joint4", "idx17_left_arm_joint5", "idx18_left_arm_joint6", "idx19_left_arm_joint7", "idx20_right_arm_joint1", "idx21_right_arm_joint2", "idx22_right_arm_joint3", "idx23_right_arm_joint4", "idx24_right_arm_joint5", "idx25_right_arm_joint6", "idx26_right_arm_joint7"]
- position:关节角度,必须填写 14 个关节的角度值
- velocity: 无效字段,置为 0.0 即可
- effort: 无效字段,置为 0.0 即可
|
| 示例脚本 |
examples/mc/arm.py |
| 备注 |
-
注意在 JOINT_SERVO 模式下该接口默认会被动作播放模块 motion_player 接管,请调用 examples/motion_player/disable_motion_player.sh 禁用后再发送指令
-
本接口推荐以 100 Hz 的频率进行调用,调用时需要注意相邻指令间隔不要超过 0.03,确保速度不超过 3 rad/s,最大加速度不超过 6.28 rad/s^2,并且指令尽量顺滑,否则可能会有抖动,推荐起码使用基本的低通滤波方法:y(k) = (1 - a) * y(k - 1) + a * x(k)。
-
角度限位如下(单位 rad)
- idx13_left_arm_joint1: -2.91 ~ 2.91
- idx14_left_arm_joint2: -0.46 ~ 1.60
- idx15_left_arm_joint3: -2.91 ~ 2.91
- idx16_left_arm_joint4: -2.00 ~ -0.03
- idx17_left_arm_joint5: -2.94 ~ 2.94
- idx18_left_arm_joint6: -0.45 ~ 0.45
- idx19_left_arm_joint7: -0.35 ~ 0.35
- idx20_right_arm_joint1: -2.91 ~ 2.91
- idx21_right_arm_joint2: -1.60 ~ 0.46
- idx22_right_arm_joint3: -2.91 ~ 2.94
- idx23_right_arm_joint4: 0.03 ~ 2.00
- idx24_right_arm_joint5: -2.94 ~ 2.94
- idx25_right_arm_joint6: -0.45 ~ 0.45
- idx26_right_arm_joint7: 0.35 ~ 0.35
-
本接口有调用限制,仅可在以下 Action 调用
- PASSIVE_UPPER_BODY_JOINT_SERVO
- RL_LOCOMOTION_ARM_EXT_JOINT_SERVO
- RL_WHOLE_BODY_EXT_JOINT_SERVO
|
| 接口名 |
/motion/control/arm_joint_state |
| 功能概述 |
手臂关节状态话题 |
| 接口类型 |
ROS2 Topic |
| 出参 |
sensor_msgs::msg::JointState
- name: 14 个关节名称
- position: 14 个关节角度
- velocity: 14 个关节速度
- effort: 14 个关节力矩
其中双臂的 6 7 关节为等效串联关节的数据,仅有 position 字段,无 velocity 和 effort 字段 |
| 示例脚本 |
examples/mc/joint_state.py |
| 备注 |
本接口无 Action 限制 |
注:双臂的6 7关节通过并联机构实现腕部控制,受并联机构的几何约束的影响,推杆的并联自由度映射到 pitch/roll 串联自由度后,得到的活动空间并不是矩形区域,而是类似一个菱形区域,示意图如下图蓝色区域所示:
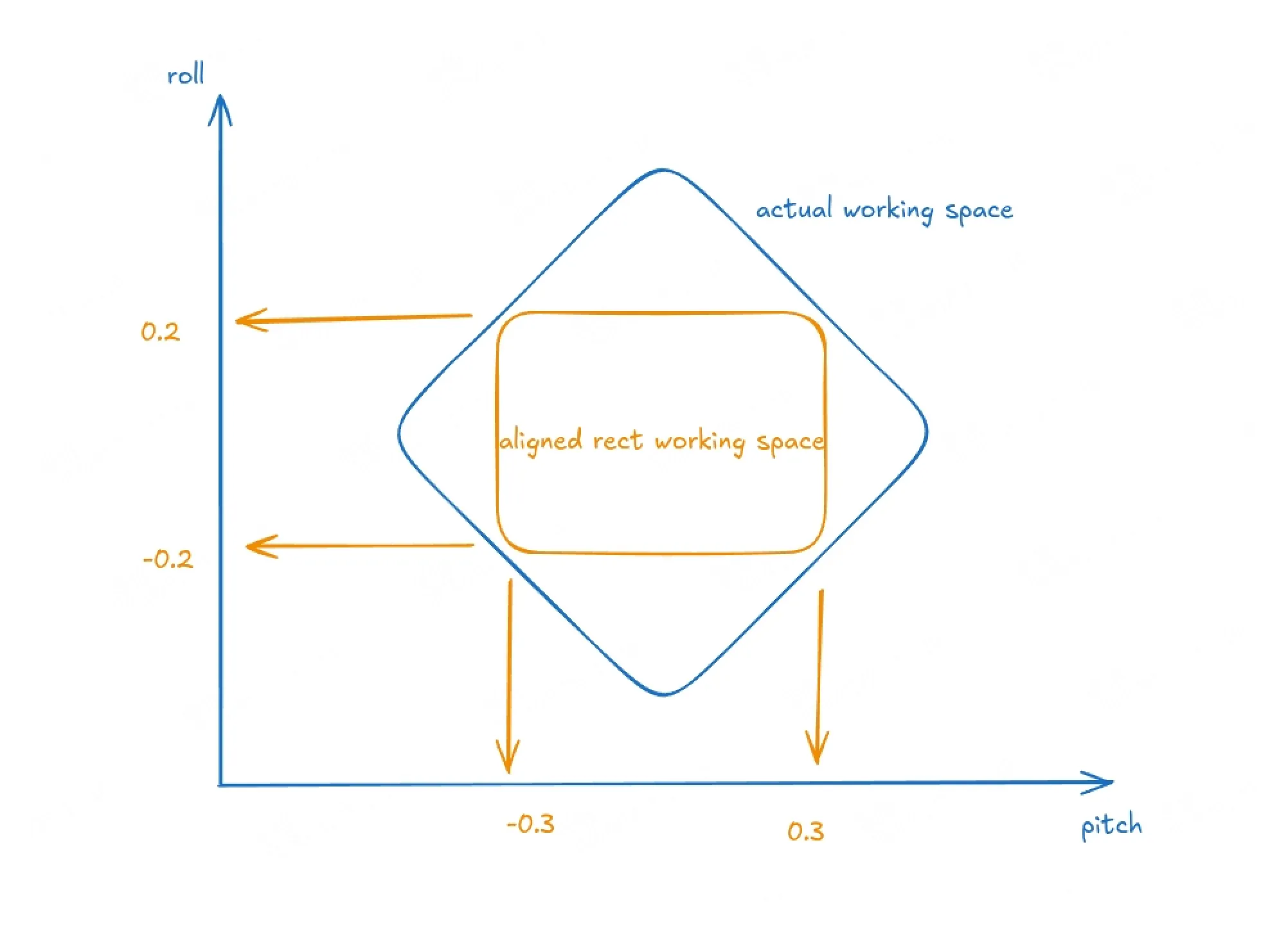
如需获得跟踪性能较好的区域可以使用图中的黄色区域,对应 6、7 关节的限位范围为 [-0.3, 0.3] , [-0.2, 0.2]
以下为应用上述黄色限位后双臂所有关节的整体限位范围:
lower_bound: [-3.0, -0.524, -2.967, -2.094, -2.967, -0.3, -0.2, -3.0, -1.5358897, -2.967, 0.1, -2.967, -0.3, -0.2]
upper_bound: [3.0, 1.5358897, 2.967, -0.1, 2.967, 0.3, 0.2, 3.0, 0.524, 2.967, 2.094, 2.967, 0.3, 0.2]
| 接口名 |
pb:/aimdk.protocol.McMotionService/PlanningMove |
| 功能概述 |
上肢规划控制接口 |
| 接口类型 |
HTTP JSON RPC |
| URL |
http://192.168.100.100:56322/rpc/aimdk.protocol.McMotionService/PlanningMove |
| 入参 |
可以传入两种类型的入参,即可接收末端 SE3 位姿,也可以接收关节角{
"header": {
"timestamp": {
"seconds": 1763696866,
"nanos": 231707000,
"ms_since_epoch": 1763696866231
},
"control_source": "ControlSource_MANUAL"
},
"group": "McPlanningGroup_LEFT_ARM",
"mode": "McPlanningMode_DEFAULT",
"target": {
"type": "SE3",
"left": {
"position": {
"x": 0.35,
"y": 0.35,
"z": 0.25
},
"orientation": {
"x": 0.570822,
"y": -0.0606913,
"z": -0.0106989,
"w": 0.818758
}
},
"right": {
"position": {
"x": 0.35,
"y": -0.35,
"z": 0.25
},
"orientation": {
"x": -0.570817,
"y": -0.0606912,
"z": 0.0106992,
"w": 0.818761
}
}
},
"reference": {
"joint_position": [
0.0,
0.0,
0.0,
0.0,
0.0,
0.0,
0.0
]
}
}
{
"header": {
"timestamp": {
"seconds": 1763697224,
"nanos": 63165000,
"ms_since_epoch": 1763697224063
},
"control_source": "ControlSource_MANUAL"
},
"mode": "McPlanningMode_DEFAULT",
"group": "McPlanningGroup_LEFT_ARM",
"target": {
"type": "JOINT",
"joints": [
0.142856,
1.06998,
-0.152017,
-1.42857,
2.3139,
-0.100991,
-0.269986
]
}
}
|
| 出参 |
{
"header": {
"code": "0",
"msg": "called successfully.",
"timestamp": {
"seconds": "1763697146",
"nanos": 154213397,
"ms_since_epoch": "0"
},
"trace_id": "",
"domin": ""
},
"task_id": "755481177558037",
"state": "CommonState_PENDING"
}
- 由于该接口为异步接口,无法直接返回任务调用是否完成,只需保存 task_id 然后调用 GetTaskState 接口查询是否调用完成
|
| 示例脚本 |
examples/mc/PlanningMoveSE3.pyexamples/mc/PlanningMoveJoint.py |
| 备注 |
-
本接口有 Action 限制,仅可在以下 Action 调用
- PASSIVE_UPPER_BODY_PLANNING_MOVE
- PASSIVE_UPPER_BODY_ONLINE_PLANNING
- RL_LOCOMOTION_ARM_EXT_PLANNING_MOVE
- RL_WHOLE_BODY_EXT_ONLINE_PLANNING
-
ONLINE_PLANNING 模式下可中断当前正在执行的目标直接执行下一个目标,同时该模式下无法查询任务执行状态,因为允许中断也意味着把执行情况判定交给了更上层
-
ONLINE_PLANNING 模式下指令和当前位置差距不能太大,比如让手从身前运动到身后,就容易规划不出来,停在一个很奇怪的位置
-
SE3 目标点表示在机器人的基座坐标系下,机器人掌心的位置和姿态。相对于 URDF 中的手臂末端有一定的偏移,这样是为了使左右手臂的末端连杆姿态一致,便于计算。
- 左臂目标点相对 left_arm_link07 位置偏移 [-0.1, 0.0, 0.0],四元数姿态偏移 [0.0, 0.0, 0.70710678, 0.70710678]
- 右臂目标点相对 right_arm_link07 位置偏移 [0.1, 0.0, 0.0],四元数姿态偏移 [-0.70710678, 0.70710678, 0.0, 1.0]
-
如果要计算掌心的位姿,可以先订阅 ros2 的 tf 话题,然后再计算掌心位置,计算示例如下:
import numpy as np
from scipy.spatial.transform import Rotation as R
|