2. 软件系统概述
2. 软件系统概述
Section titled “2. 软件系统概述”2.1 基本启动模式
Section titled “2.1 基本启动模式”机器人搭载一台 x86_64 架构工控机和 arm64 架构 AGX Jetson Orin工控机,简称为 x86 和 orin,均安装 Ubuntu 22.04 系统,均使用 systemd 作为系统服务管理器,都配置有 agibot_em.service 作为智元软件系统入口点,该服务开机自启,会拉起 EM(进程启动管理)、SM(进程状态管理)模块,再由 EM 和 SM 配合拉起其余各个模块进程,SM 会对不同系统模式下的进程列表进行开启和关闭的状态管理(为规避进程启停造成的共享内存资源异常占用问题,自 1.3 版本起系统模式切换不再开关进程,而是调用进程的 activate 和 deactivate 接口,进程仍然保留)。
EM 和 SM 的配置文件路径分别为 /agibot/software/v0/entry/bin/cfg/run_agibot.yaml(x86 & orin) 和 /agibot/software/v0/entry/bin/cfg/sm.yaml(orin),前者列有默认启动的进程列表,后者列有各个系统模式分别启用哪些功能组的进程 。
2.2 模块功能简介
Section titled “2.2 模块功能简介”部分模块 orin 和 X86 上均存在,后缀为 1 为 orin,后缀为 0 为 X86
| 模块性质 | 所属工控机 | 名称 | 说明/作用 | |
|---|---|---|---|---|
| SoC 外设备 | AimMaster | 客户端软件 | 用于操作控制机器人的基本功能 | |
| OMP | 智元云端平台 | 负责收端侧埋点信息上报 | ||
| VR | 虚拟现实设备 | 用于机器人的遥操作 | ||
| MCU | 微控制器 | 对下控制机器人电机、接收电机和IMU 等信息,对上与 HAL Ethercat 通信接收控制指令,上传电机和IMU 等信息 | ||
| 公共服务 基础服务 | ORIN | MQTT broker(mosquitto) | MQTT网关 | MQTT 网关节点,对接AimMaster和机上软件接口 |
| data_exporter | 日志导出功能 | 提供日志批量、分时段导出等功能 | ||
| ORIN & X86 | iox_roudi | iceoryx共享内存中心节点 | 负责 iceoryx 通信的中心调度,提供数据的储存位置 | |
| setting | 设置模块 | 提供基本机器人工控机设置,如 wifi、蓝牙等 | ||
| recordbag | 录包 | 用来持续记录bag包 | ||
| reboot | 重启指令 | 由 sm 调用时对系统进行重启 | ||
| poweroff | 关机指令 | 由 sm 调用时执行关机操作 | ||
| 管理模块 | ORIN | SM | 系统状态管理模块 | 负责切换系统状态,管控进程列表 |
| ORIN & X86 | EM | 进程管理模块 | 负责拉起进程,查询进程状态 | |
| 功能模块 | X86 | sota_ota ota_gateway ota_master | OTA相关功能模块 | 负责下载OTA包以及执行OTA流程 |
| hal_ethercat | 硬件抽象层模块 | 负责与MCU进行ethercat通信,传递硬件的状态信息和控制指令 | ||
| mc | 运动控制模块 | 负责整个机器人的运动控制,下发运控动作指令 | ||
| motion_streamer | 动作流模块 | 专门用于遥操作,接受VR 动捕服数据映射为机器人的动作 | ||
| rc | 遥控模块 | 向AimMaster提供接口调用机器人的基本功能和状态并记录相关信息保存到日志 | ||
| motion_player | 动作播放模块 | 负责解算、映射、播放指定动作文件 | ||
| tf | 坐标变换模块 | 提供坐标变换服务 | ||
| fota_slave | 固件升级模块 | 负责 FOTA 升级的模块 | ||
| health_monitor | 健康监控模块 | 负责看护所有业务模块和底层硬件的健康 | ||
| legged_odometry | 感知定位模块 | 负责读取每条腿的关节角度和IMU数据得到机器人坐标系的位姿,发送到导航或控制模块 | ||
| open_long_server | 长连接进程模块 | 负责保持一条24小时不断线的通道,让外部设备随时可以遥控机器人,实时下发动作或拉取日志 | ||
| ORIN | hal_audio | 音频播放模块 | 提供原子性的音频播放能力,供 agent 调用 | |
| agent | 语音智能体模块 | 执行语音大模型,云端交互逻辑等,下发语言、动作、表情等指令 | ||
| hds | 健康诊断模块 | 接收各个模块上报的故障信息 | ||
| task_engine | 任务管理模块 | 负责对 AimMaster 创建的任务进行执行等 | ||
| pnc | 导航规划模块 | 负责导航的路径规划 | ||
| slam agivslam | 建图定位模块 | 负责建图、定位等功能 | ||
| mm | 地图管理模块 | 负责地图数据加载与解析,将构建好的地图融合以及地图更新 | ||
| perception perception_object perception_qr | 感知模块 | 将导航相关的传感器信息收集处理提供给 pnc 和操作等模块 | ||
| hal_dcw2 hal_d415 hal_lidar hal_xinying(T3) tz_camera(P1) | 传感器驱动模块 | 负责加载各个摄像头驱动,将图像原始帧用 ros2 话题发布出来 | ||
| gateway | 域外网关通信 | 将外部的请求转发到内部各个模块 | ||
| data_proxy | 数据搬运模块 | 负责把机器人里的日志、状态、视频流、文件等统一打包,按需转发到云端、上位机或调试工具;同时把外部传来的升级包、动作文件、配置指令再分发到对应模块。 | ||
| colistener coencoder cobridge | 数据闭环相关 | 负责机器人数据与云端等闭环 | ||
| embodied_agent | 具身操作调度模块 | 是机器人真正的智能主控,负责让机器人听得懂、想得通、动得对,完成上层给它的具体任务。 | ||
| manipulator | 具身操作执行模块 | 提供底层抓取、派发等原子能力 | ||
| skillpilot | 技能调度模块 | 对机器人的基本技能进行统一的管理仲裁调度 | ||
| resource_manager | 资源管理模块 | 统一管理机上动作、表情、播报等资源文件 |
2.2.1 系统模式
Section titled “2.2.1 系统模式”各个系统模式下激活和启动的模块有所不同,如下(摘录自 sm.yaml)
# 系统状态 system_modes: "Startup": next_mode_list: [ "Ready", "OTA", "Poweroff" ] active_FG_list: [ "System", "HAL", "EStop", "Manager", "RC", "MoCap", "Gateway", "Perception", "OTA" ] action_list: - [ DIFF ] - [ activate recordbag0 ] - [ activate recordbag1 ] - [ activate tz_camera ] - [ activate hal_d415 ]
"Poweroff": next_mode_list: [] active_FG_list: [] action_list: - [ open Poweroff ]
"Reboot": next_mode_list: [] active_FG_list: [] action_list: - [ open Reboot ]
# 系统的就绪状态,会启动业务管理模块以及HAL "Ready": next_mode_list: [ "Manual", "EStop", "Poweroff" ] active_FG_list: [ "System", "HAL", "EStop", "Manager", "SLAM", "RC", "MoCap", "Gateway", "Perception", "Motion", "OTA" ] action_list: - [ DIFF ] - [ activate recordbag0 ] - [ activate recordbag1 ] - [ activate tz_camera ] - [ activate hal_d415 ] - [ activate agent ] - [ activate pnc ] - [ activate mc ] - [ activate slam ] - [ activate perception ] - [ deactivate rc ] - [ deactivate task_engine TaskMaster cancel ] - [ activate motion_player ] # post_process: # - level: 34 # action_list: [ [ forbid Manual ] ]
# OTA状态,会启动OTA功能组,完成OTA相关功能 "OTA": next_mode_list: [ "Reboot", "Ready", "Poweroff" ] active_FG_list: [ "System", "HAL", "Manager", "SLAM", "RC", "MoCap", "Gateway","Perception", "Motion", "OTA" ] action_list: - [ DIFF ] - [ activate recordbag0 ] - [ activate recordbag1 ] - [ activate tz_camera ] - [ activate hal_d415 ] - [ deactivate agent ] - [ deactivate pnc ] - [ deactivate mc ] - [ deactivate slam ] - [ deactivate perception ] - [ deactivate rc ] - [ deactivate task_engine TaskMaster cancel ] - [ deactivate motion_player ]
# 手动状态,会启动遥控以及MC功能组 "Manual": next_mode_list: [ "OTA", "Auto", "Reset", "EStop", "Calibration", "Poweroff", "MotionStream", "DataCollection", "FreeExploration", "Mapping", "Manipulator" ] active_FG_list: [ "System", "HAL", "EStop", "Manager", "SLAM", "RC", "MoCap", "Gateway", "Perception", "Motion", "OTA" ] action_list: - [ DIFF ] - [ activate recordbag0 ] - [ activate recordbag1 ] - [ activate tz_camera ] - [ activate hal_d415 ] - [ activate agent ] - [ activate pnc ] - [ activate mc ] - [ activate slam ] - [ activate perception ] - [ activate rc ] - [ deactivate task_engine TaskMaster cancel ] - [ activate motion_player ] child_modes: - mode_name: "Safety" # 通过tools下使能脚本调用进入的状态 extra_next_modes: [ "OTA", "Reset" ] action_list: - [ deactivate rc ] - [ close Motion ] - [ close EStop ] post_process: - level: 47 action_list: [ [ fallback mc ] ]
# 建图状态 "Mapping": next_mode_list: [ "Manual" ] active_FG_list: [ "System", "HAL", "EStop", "Manager", "SLAM", "RC", "MoCap", "Gateway", "Perception", "Motion", "OTA" ] action_list: - [ DIFF ] - [ activate recordbag0 ] - [ activate recordbag1 ] - [ activate tz_camera ] - [ activate hal_d415 ] - [ activate agent ] - [ activate pnc ] - [ activate mc ] - [ activate slam ] - [ deactivate perception ] - [ activate rc ] - [ deactivate task_engine TaskMaster cancel ] - [ activate motion_player ]
# 自动状态,会启动任务引擎以及所有业务功能组 "Auto": next_mode_list: [ "Manual", "EStop", "Poweroff", "FreeExploration" ] active_FG_list: [ "System", "HAL", "EStop", "Manager", "SLAM", "RC", "MoCap", "Gateway", "Perception", "Motion", "OTA" ] action_list: - [ DIFF ] - [ activate recordbag0 ] - [ activate recordbag1 ] - [ activate tz_camera ] - [ activate hal_d415 ] - [ activate agent ] - [ activate pnc ] - [ activate mc ] - [ activate slam ] - [ activate perception ] - [ deactivate rc ] - [ activate task_engine ] - [ activate motion_player ] child_modes: - mode_name: "Safety" extra_next_modes: [ "OTA", "Reset" ] action_list: - [ deactivate task_engine ] - [ close Motion ] - [ close EStop ] # post_process: # # - level: 47 # # action_list: [ [ MAID ] ] # # - level: 43 # # action_list: [ [ fallback motion_player ], [ fallback task_engine XXModule B ], [ Move Manual ] ] # # - level: 40 # # action_list: [ [ MAID ] ] # - level: 37 # action_list: [ [ fallback task_engine ], [ move Manual ] ] # - level: 34 # action_list: [ [ fallback task_engine, fallback mc ] ] # # - level: 31 # # action_list: [ [ MAID ] ]
# 具身操作模式 "Manipulator": next_mode_list: [ "OTA", "Reset", "EStop", "Poweroff", "FreeExploration", "Manual" ] active_FG_list: [ "System", "HAL", "EStop", "Manager", "SLAM", "RC", "MoCap", "Gateway", "Perception", "Motion", "OTA" ] action_list: - [ DIFF ] - [ activate recordbag0 ] - [ activate recordbag1 ] - [ activate tz_camera ] - [ activate hal_d415 ] - [ activate agent ] - [ activate pnc ] - [ activate mc ] - [ activate slam ] - [ activate perception ] - [ activate rc ] - [ deactivate task_engine TaskMaster cancel ] - [ deactivate motion_player ]
# 自由探索模式 "FreeExploration": next_mode_list: [ "Manual", "EStop", "Poweroff", "Auto" ] active_FG_list: [ "System", "HAL", "EStop", "Manager", "SLAM", "RC", "MoCap", "Gateway", "Perception", "Motion", "OTA" ] action_list: - [ DIFF ] - [ activate recordbag0 ] - [ activate recordbag1 ] - [ activate tz_camera ] - [ activate hal_d415 ] - [ activate agent ] - [ activate pnc ] - [ activate mc ] - [ activate slam ] - [ activate perception ] - [ deactivate rc ] - [ activate task_engine ] - [ activate motion_player ] child_modes: - mode_name: "Safety" extra_next_modes: [ "OTA", "Reset" ] action_list: - [ deactivate task_engine ] - [ close Motion ] - [ close EStop ]
# 重置状态,用于恢复出厂设置 "Reset": next_mode_list: [ "Reboot", "Poweroff" ] active_FG_list: [ "System", "OTA", "Gateway" ] action_list: - [ DIFF ]
# 紧急停止状态,用于紧急停止 "EStop": next_mode_list: [ "Ready", "OTA", "Poweroff" ] active_FG_list: [ "System", "HAL", "EStop", "Manager", "SLAM", "RC", "MoCap", "Gateway", "Perception", "Motion", "OTA" ] action_list: - [ DIFF ] - [ activate recordbag0 ] - [ activate recordbag1 ] - [ activate tz_camera ] - [ activate hal_d415 ] - [ activate agent ] - [ activate pnc ] - [ deactivate mc ] - [ activate slam ] - [ activate perception ] - [ deactivate rc ] - [ deactivate task_engine TaskMaster cancel ] - [ activate motion_player ]
# 安全状态,用于安全状态 # "Safe": # next_mode_list: [ "Manual", "EStop", "Poweroff" ] # active_FG_list: [ "System", "HAL", "EStop", "Manager", "SLAM", "RC", "MoCap", "Gateway", "Perception", "Motion" ] # action_list: # - [ DIFF ] # - [ deactivate mc, deactivate rc ]
# 实时遥操作状态,用于实时遥操作 "MotionStream": next_mode_list: [ "Manual", "EStop", "Poweroff", "RemoteMotionStream", "DataCollection" ] active_FG_list: [ "System", "HAL", "EStop", "Manager", "SLAM", "RC", "MoStream", "Gateway", "Motion", "Perception", "OTA" ] action_list: - [ DIFF ] - [ activate recordbag0 ] - [ activate recordbag1 ] - [ activate tz_camera ] - [ activate hal_d415 ] - [ activate agent ] - [ activate pnc ] - [ deactivate mc ] - [ activate slam ] - [ activate perception ] - [ activate rc ] - [ deactivate task_engine TaskMaster cancel ]
"RemoteMotionStream": next_mode_list: [ "Manual", "EStop", "Poweroff", "MotionStream" ] active_FG_list: [ "System", "HAL", "EStop", "Manager", "SLAM", "RC", "MoStream", "Gateway", "Motion", "Perception", "OTA", "RTC" ] action_list: - [ deactivate tz_camera ] - [ deactivate hal_d415 ] - [ activate recordbag0 ] - [ activate recordbag1 ] - [ DIFF ] - [ activate agent ] - [ activate pnc ] - [ deactivate mc ] - [ activate slam ] - [ activate perception ] - [ activate rc ] - [ deactivate task_engine TaskMaster cancel ]
# 标定状态, 用于标定,客户端请求标定进入 "Calibration": next_mode_list: [ "Ready" ] active_FG_list: [ "System", "HAL", "EStop", "Manager", "SLAM", "RC", "Gateway", "Motion", "Perception", "OTA", "Calibration" ] action_list: - [ DIFF ] - [ activate recordbag0 ] - [ activate recordbag1 ] - [ activate tz_camera ] - [ activate hal_d415 d415 Calibration ] - [ deactivate agent ] - [ deactivate pnc ] - [ deactivate mc ] - [ deactivate slam ] - [ deactivate perception ] - [ deactivate rc ] - [ deactivate task_engine TaskMaster cancel ] # post_process: # # - level: 43 # # action_list: [ [ fallback calibration ] ] # # - level: 37 # # action_list: [ [ fallback calibration ] ] # - level: 34 # action_list: [ [ fallback task_engine, fallback mc ] ]
"DataCollection": next_mode_list: [ "Manual", "EStop", "Poweroff", "MotionStream" ] active_FG_list: [ "System", "HAL", "EStop", "Manager", "SLAM", "RC", "MoStream", "Gateway", "Motion", "Perception", "OTA", "Data_Collector" ] action_list: - [ DIFF ] - [ deactivate recordbag0 ] - [ deactivate recordbag1 ] - [ activate tz_camera tzcamera DataCollection ] - [ activate hal_d415 d415 DataCollection ] - [ activate agent ] - [ activate pnc ] - [ deactivate mc ] - [ activate slam ] - [ deactivate perception ] - [ activate rc ] - [ deactivate task_engine TaskMaster cancel ]2.2.2 模块禁用方式(谨慎)
Section titled “2.2.2 模块禁用方式(谨慎)”由于现在功能众多,ORIN 上负载较高,如需二开替换某些功能模块,需要在系统中配置该模块不启动。
模块依照受 run_agibot.yaml (x86 & orin)和 sm.yaml (orin) 管理分为两种,前者管理的模块会在启动时默认启动,后续也不受 sm 管理,保持常驻;后者管理的模块会在各个系统模式间切换。
-
如果需要禁用 run_agibot.yaml 中管理的模块(即其中 default_apps 中的部分),只需要从 default_apps 中移除即可。
-
如果需要禁用 sm 管理的模块,则需在相应的系统模式中加入一行 deactivate,指定去使能对应模块。
以禁用 motion_play 模块为例,可按照如下步骤进行操作。首先在 run_agibot.yaml(x86) 将 default_apps 列表里 motion_play 模块移除:
@@ -20,7 +20,6 @@ process_manager: "iox_roudi", "hal_ethercat", "recordbag0",- "motion_player", "ota_gateway", "ota_master", "fota_slave",然后在 sm.yaml (orin) 中 移除 SystemManagerModule 中 group 里的 motion_player, 将 MoCap 配置修改为空,并移除各状态下对 motion_player 的 activate / deactivate 操作:
@@ -14,7 +14,7 @@ SystemManagerModule:- group: [ota_master, motion_player, motion_streamer, sota_slave0, mc, tf, dr, rc, hal_ethercat, poweroff0, reboot0, setting0, recordbag0, data_collector, health_monitor0]+ group: [ota_master, motion_streamer, sota_slave0, mc, tf, dr, rc, hal_ethercat, poweroff0, reboot0, setting0, recordbag0, data_collector, health_monitor0] url: "http://${AGIBOT_NEIGHBOR_HOST_IP}:50081"@@ -40,7 +40,7 @@ SystemManagerModule: "RC": [ "rc" ] "MoCap":- [ "motion_player" ]+ [] "MoStream": [ "motion_streamer" ] "Ready":@@ -100,7 +100,6 @@ SystemManagerModule: - [ activate perception ] - [ deactivate rc ] - [ deactivate task_engine TaskMaster cancel ]- - [ activate motion_player ] "OTA":@@ -122,7 +121,6 @@ SystemManagerModule: - [ deactivate perception ] - [ deactivate rc ] - [ deactivate task_engine TaskMaster cancel ]- - [ deactivate motion_player] "Manual":@@ -140,7 +138,6 @@ SystemManagerModule: - [ activate perception ] - [ activate rc ] - [ deactivate task_engine TaskMaster cancel ]- - [ activate motion_player ] "Mapping":@@ -169,7 +166,6 @@ SystemManagerModule: - [ deactivate perception ] - [ activate rc ] - [ deactivate task_engine TaskMaster cancel ]- - [ activate motion_player ] "Auto":@@ -188,7 +184,6 @@ SystemManagerModule: - [ activate perception ] - [ deactivate rc ] - [ activate task_engine ]- - [ activate motion_player ] "Manipulator":@@ -227,7 +222,6 @@ SystemManagerModule: - [ activate perception ] - [ activate rc ] - [ deactivate task_engine TaskMaster cancel ]- - [ deactivate motion_player ] "FreeExploration":@@ -246,7 +240,6 @@ SystemManagerModule: - [ activate perception ] - [ deactivate rc ] - [ activate task_engine ]- - [ activate motion_player ] "EStop":@@ -279,7 +272,6 @@ SystemManagerModule: - [ activate perception ] - [ deactivate rc ] - [ deactivate task_engine TaskMaster cancel ]- - [ activate motion_player ]2.3 机上磁盘目录
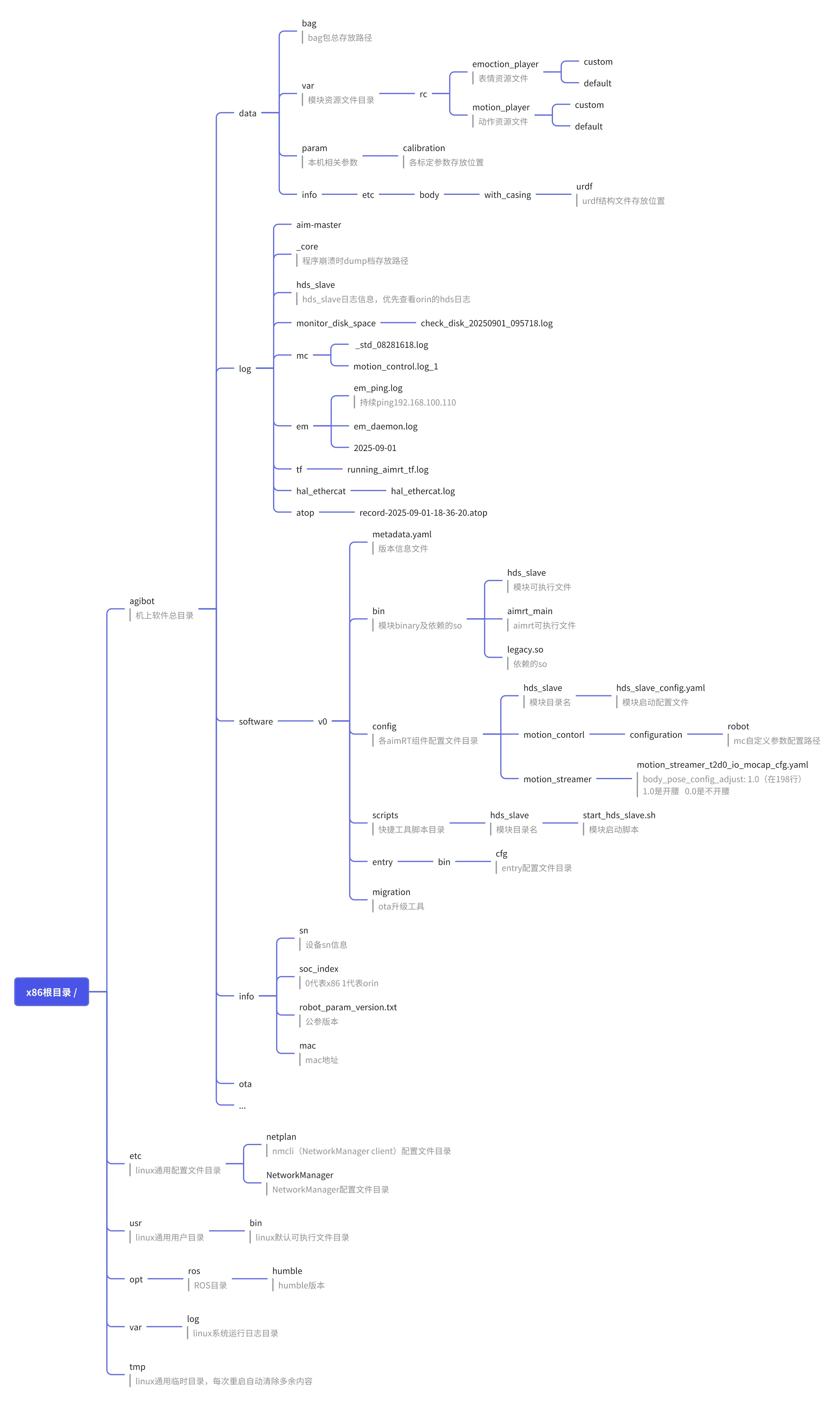
Section titled “2.3 机上磁盘目录”orin
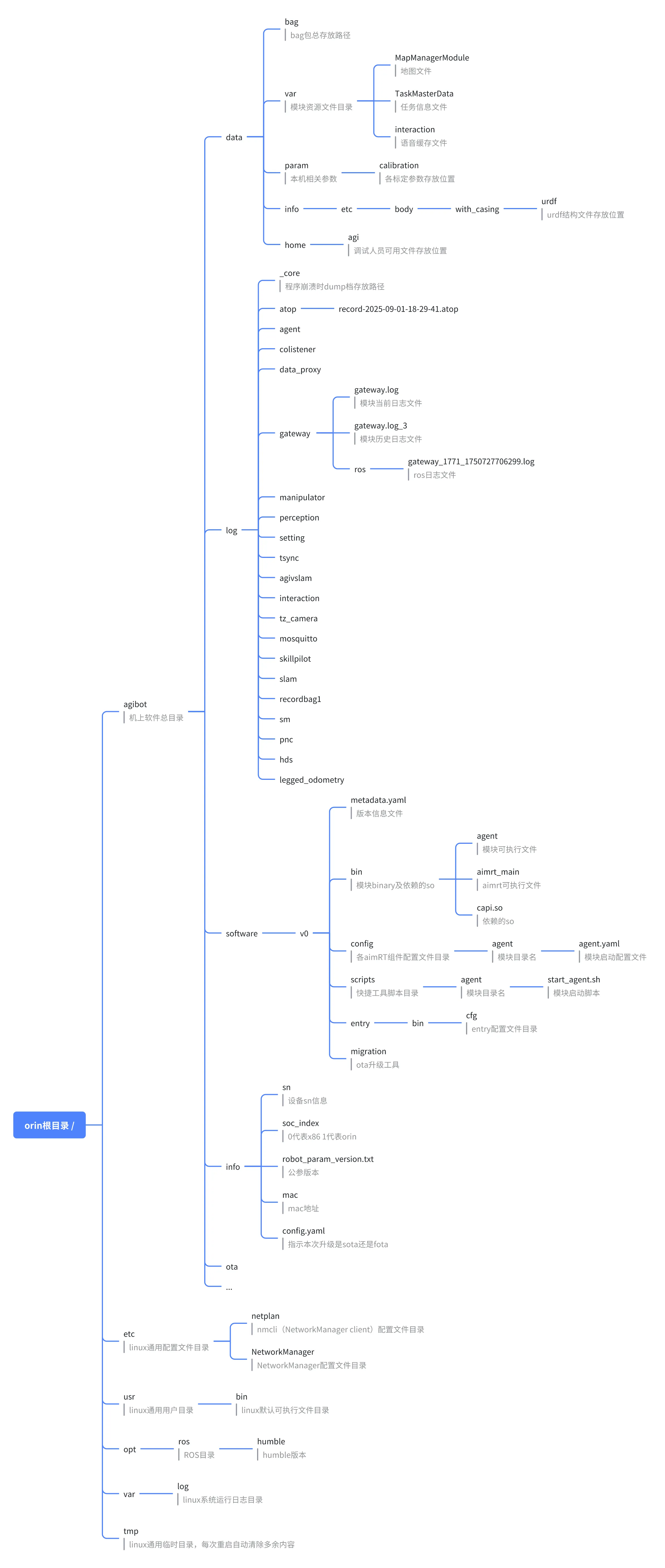
X86