9. 交互二开使用指南
9. 交互二开使用指南
Section titled “9. 交互二开使用指南”交互相关的端侧二次开发提供两类开发模式:
- 智元交互简单拓展
- 智元交互能力保留,由智元提供 tts 和动作表情等基本接口,可以通过这些接口操作机器人进行基本展厅导览、讲解等流程,同时机器人可正常走智元语音交互方案。
- 二次开发完全接管
- 关闭智元交互能力,由智元提供包含本体降噪后的机器人麦克风输入,开放扬声器使用权限及人脸识别结果,完全由二次开发程序接管语音交互相关内容。
以下为二者详细对比表格
| 模式 | 智元交互能力是否保留 | 智元侧提供接口 | 联网需求 | 适用场景 | 开发难度及工作量 |
|---|---|---|---|---|---|
| 智元交互简单拓展 | 是 | tts、动作、表情、人脸识别接口 | 智元交互方案以及 tts 接口都需要联网 | 开发简单展厅导览演示 demo,固定流程编排 | 较为简单,工作量取决于流程复杂程度,一般较小 |
| 二次开发完全接管 | 否 | 降噪音频、扬声器、人脸识别接口 | 机器人初始化时需要联网,后续使用无需联网 | 自行开发完整交互方案 | 难度较大,需要有完整的相关研发团队,工作量较大 |
9.1 智元交互简单拓展
Section titled “9.1 智元交互简单拓展”在此类开发模式下,可以调用的接口如下:
| 接口名/订阅主题 | 接口描述 | 请求消息类型 | 答复消息类型 | 备注 | 通信后端 |
|---|---|---|---|---|---|
TTSService.PlayTTS | 文本转语音播放 | PlayTTSRequest | PlayTTSResponse | 支持优先级控制和打断策略 | http |
TTSService.PlayMediaFile | 播放本地音频文件 | PlayMediaFileRequest | PlayTTSResponse | 支持 PCM/WAV 格式文件播放 | http |
TTSService.GetAudioStatus | 查询 TTS/音频文件状态 | GetTTSStatusRequest | GetTTSStatusResponse | 获取当前播报状态和队列信息 | http |
/interaction/tts_status | 查询 TTS/音频文件状态 | TTSStatus | - | 获取当前播报状态和队列信息 | ros2 |
TTSService.StopTTSTraceId | 停止指定 id 的 TTS/音频文件播报 | StopTTSTraceIdRequest | CommonResponse | 仅终止指定 trace_id 的播报任务 | http |
TTSService.StopTTS | 停止所有 TTS/音频文件播报 | CommonRequest | CommonResponse | 终止当前播报和所有队列中的任务 | http |
HalAudioService.GetAudioVolume | 音量获取 | CommonRequest | VolumeResponse | 获取当前音量大小 | http |
HalAudioService.SetAudioVolume | 音量设置 | VolumeRequest | AudioCommonResponse | 调节当前音量大小 | http |
MotionCommandService.SendMotionCommand | 播放指定动作文件 | MotionCommandRequest | CommonResponse | 仅可在 JOINT_SERVO 后缀的运控 Action 下调用 | http |
MotionCommandService.GetMotionStatus | 查询动作播放状态 | CommonRequest | MotionCommandResponse | 获取当前动作播放状态 | http |
ResourceService.GetMotion | 获取动作列表 | GetMotionReq | GetMotionResp | 路径可在 x86 上找到对应文件 | http |
RcMotionPlayerService.PlayerMotion | 播放指定 id 的动作 | RcPlayerMotionRequest | CommonResponse | 仅可在 JOINT_SERVO 后缀的运控 Action 下调用 | http |
ResourceService.GetEmoticon | 获取表情列表 | GetEmoticonReq | GetEmoticonResp | 路径可在 x86 上找到对应文件 | http |
RcEmoticonPlayerService.PlayerEmoticon | 播放指定 id 的表情 | RcPlayerEmoticonRequest | RcPlayerEmoticonResponse | 仅播放指定 motion_id 的表情 | http |
/agent/vision/face_id | 人脸识别结果 | FaceIdResult | - | 需要source环境后使用 | ros2 |
交互相关接口的详细信息可参考 动作播放部分、表情播放部分、 TTS/音频播放部分和麦克风管理部分 接口文档进行调用。交互相关接口的示例文件在 AimDK 包中 examples/rc, examples/motion_player, examples/agent 和 examples/hal_audio 目录下均有提供,可参考。
9.2 二次开发完全接管
Section titled “9.2 二次开发完全接管”智元交互链路涉及到的模块一共有两个,分别为 agent 和 hal_audio,可以简单理解为 agent 模块管理麦克风部分,hal_audio 模块管理扬声器部分。agent 模块采集音频并进行语音识别,然后与云端模型交互,得到结果后发送给 hal_audio 模块,hal_audio 模块再根据结果进行相应的语音播放、动作、表情等操作。
9.2.1 退出智元交互链路
Section titled “9.2.1 退出智元交互链路”在此模式下,需要让智元的交互程序退出交互链路,仅输出包含本体降噪后的麦克风音频、人脸识别结果并让出扬声器的控制权,需要进行的操作有两个:
- 调整 agent 模块为 only_voice / voice_face 模式,可以使用麦克风管理部分
SetAgentPropertiesRequest接口。
-
only_voice:仅输出降噪麦克音频 /agent/process_audio_output,后续链路全部断开
-
voice_face:输出降噪麦克音频 /agent/process_audio_output 和人脸识别结果 /agent/vision/face_id,后续链路全部断开
例如调整为 only_voice 模式所需调用的 rpc 如下:
Terminal window curl -i \-H 'content-type:application/json' \-X POST 'http://192.168.100.110:59301/rpc/aimdk.protocol.AgentControlService/SetAgentPropertiesRequest' \-d '{ "contents": { "properties": { "2": "only_voice" } } }'调用后需要重启机器人才能生效,可以待第二步的修改完成后再一块重启即可。重启后可以通过使用麦克风管理部分
GetAgentPropertiesRequest接口查询当前交互运行模式,判断模式是否修改成功。 (如需恢复,则将SetAgentPropertiesRequest接口中的 “only_voice / voice_face” 改为 “normal” 即可)
-
修改配置默认不启动 hal_audio 模块(修改一次即可,后续无需重复修改)
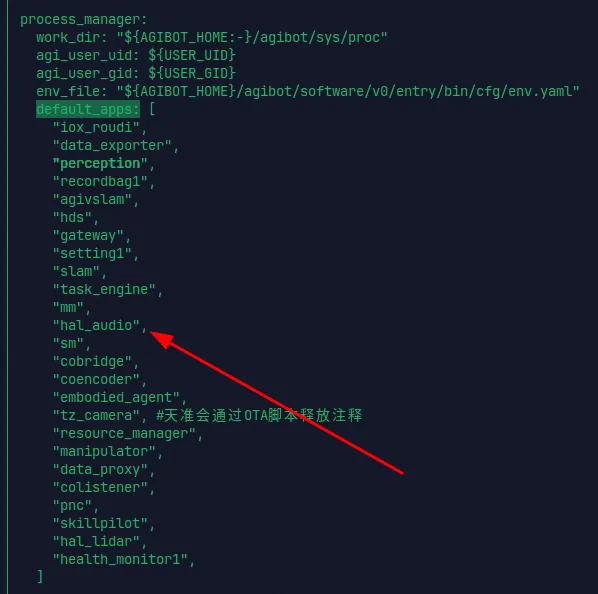
首先备份 ORIN 上的 /agibot/software/v0/entry/bin/cfg/run_agibot.yaml 文件
Terminal window cp /agibot/software/v0/entry/bin/cfg/run_agibot.yaml /agibot/software/v0/entry/bin/cfg/run_agibot.yaml.backup然后在 run_agibot.yaml 文件中删除 default_apps 中的 hal_audio 模块,其他部分不要修改。改完成后重启机器人。(如需恢复,则将以上文件还原并重启机器人即可)
以上操作完成后智元交互已退出交互链路。
9.2.2 麦克风音频获取
Section titled “9.2.2 麦克风音频获取”注意:要获取以下音频需要机器人开机时至少联网 2 分钟以上完成音频相关鉴权操作,否则将无原始音频输出,如需离线使用,请首先保证该接口有音频输出后再断网
退出交互链路后,可通过降噪麦克音频 Topic 接口 /agent/process_audio_output 获得本体降噪后的麦克风音频信息。获取本体降噪后的麦克风音频示例程序如下:
#!/usr/bin/env python3
import rclpyfrom rclpy.node import Nodefrom rclpy.qos import QoSHistoryPolicy, QoSProfile, QoSReliabilityPolicyfrom ros2_plugin_proto.msg import RosMsgWrapper
from aimdk.protocol_pb2 import ProcessedAudioOutput, AudioVADState
import datetimeimport os
class AudioSubscriber(Node): def __init__(self): super().__init__("audio_subscriber")
# 音频缓冲区,按 stream_id 分别存储 self.audio_buffers = {} # {stream_id: bytearray()} self.recording_state = {} # {stream_id: bool} 记录是否正在录音
# 创建音频文件存储目录 self.audio_output_dir = "audio_recordings" os.makedirs(self.audio_output_dir, exist_ok=True)
qos_profile = QoSProfile( history=QoSHistoryPolicy.KEEP_LAST, depth=10, reliability=QoSReliabilityPolicy.BEST_EFFORT, )
self.subscription = self.create_subscription( RosMsgWrapper, "/agent/process_audio_output/pb_3Aaimdk_2Eprotocol_2EProcessedAudioOutput", self.audio_callback, qos_profile, )
self.get_logger().info("开始订阅降噪音频数据。..")
def audio_callback(self, msg): try: # 检查序列化类型是否为 pb if msg.serialization_type != "pb": self.get_logger().warn(f"不支持的序列化类型:{msg.serialization_type}") return
# 将 data 字段从 list[bytes] 转换为 bytes audio_data_bytes = b"".join(msg.data)
# 使用生成的 protobuf 类解析消息 processed_audio = ProcessedAudioOutput() processed_audio.ParseFromString(audio_data_bytes)
self.get_logger().info( f"收到音频数据:stream_id={processed_audio.stream_id}, " f"vad_state={processed_audio.vad_state}, " f"audio_size={len(processed_audio.audio_data)} bytes" )
# 根据 VAD 状态处理音频 self.handle_vad_state(processed_audio)
except Exception as e: self.get_logger().error(f"处理音频消息时出错:{e}")
def handle_vad_state(self, processed_audio): """处理不同的 VAD 状态""" vad_state = processed_audio.vad_state stream_id = processed_audio.stream_id audio_data = processed_audio.audio_data
# 初始化该 stream_id 的缓冲区(如果不存在) if stream_id not in self.audio_buffers: self.audio_buffers[stream_id] = bytearray() self.recording_state[stream_id] = False
# VAD 状态名称映射 vad_state_names = { AudioVADState.AUDIO_VAD_STATE_NONE: "无语音", AudioVADState.AUDIO_VAD_STATE_BEGIN: "语音开始", AudioVADState.AUDIO_VAD_STATE_PROCESSING: "语音处理中", AudioVADState.AUDIO_VAD_STATE_END: "语音结束", }
stream_names = {1: "内置麦克风", 2: "外置麦克风"}
self.get_logger().info( f"[{stream_names.get(stream_id, f'未知流{stream_id}')}] " f"VAD 状态:{vad_state_names.get(vad_state, f'未知状态{vad_state}')} " f"音频数据:{len(audio_data)} bytes" )
# 根据 VAD 状态处理音频数据 if vad_state == AudioVADState.AUDIO_VAD_STATE_BEGIN: self.get_logger().info("🎤 检测到语音开始") # 开始新的录音,清空缓冲区 self.audio_buffers[stream_id].clear() self.recording_state[stream_id] = True # 添加当前音频数据 if len(audio_data) > 0: self.audio_buffers[stream_id].extend(audio_data)
elif vad_state == AudioVADState.AUDIO_VAD_STATE_PROCESSING: self.get_logger().info("🔄 语音处理中。..") # 如果正在录音,继续添加音频数据到缓冲区 if self.recording_state[stream_id] and len(audio_data) > 0: self.audio_buffers[stream_id].extend(audio_data)
elif vad_state == AudioVADState.AUDIO_VAD_STATE_END: self.get_logger().info("✅ 语音结束") # 添加最后的音频数据 if self.recording_state[stream_id] and len(audio_data) > 0: self.audio_buffers[stream_id].extend(audio_data)
# 保存完整的音频段 if ( self.recording_state[stream_id] and len(self.audio_buffers[stream_id]) > 0 ): self.save_audio_segment(bytes(self.audio_buffers[stream_id]), stream_id)
# 结束录音 self.recording_state[stream_id] = False
elif vad_state == AudioVADState.AUDIO_VAD_STATE_NONE: # 无语音状态,不进行录音 if self.recording_state[stream_id]: self.get_logger().info("⏹️ 录音状态重置") self.recording_state[stream_id] = False
# 输出当前缓冲区状态 if stream_id in self.audio_buffers: buffer_size = len(self.audio_buffers[stream_id]) recording = self.recording_state[stream_id] self.get_logger().debug( f"[Stream {stream_id}] 缓冲区大小:{buffer_size} bytes, 录音状态:{recording}" )
def save_audio_segment(self, audio_data, stream_id): """保存音频段 16kHz, 16 位,单声道 PCM""" if len(audio_data) > 0: timestamp = datetime.datetime.now().strftime("%Y%m%d_%H%M%S_%f")
# 按 stream_id 创建子目录 stream_dir = os.path.join(self.audio_output_dir, f"stream_{stream_id}") os.makedirs(stream_dir, exist_ok=True)
# 生成文件名 stream_names = {1: "internal_mic", 2: "external_mic"} stream_name = stream_names.get(stream_id, f"stream_{stream_id}") filename = f"{stream_name}_{timestamp}.pcm" filepath = os.path.join(stream_dir, filename)
try: with open(filepath, "wb") as f: f.write(audio_data) self.get_logger().info( f"音频段已保存:{filepath} (大小:{len(audio_data)} bytes)" )
# 记录音频文件的时长(假设 16kHz, 16 位,单声道) sample_rate = 16000 bits_per_sample = 16 channels = 1 bytes_per_sample = bits_per_sample // 8 total_samples = len(audio_data) // (bytes_per_sample * channels) duration_seconds = total_samples / sample_rate
self.get_logger().info( f"音频时长:{duration_seconds:.2f} 秒 ({total_samples} 样本)" )
except Exception as e: self.get_logger().error(f"保存音频文件失败:{e}")
def get_buffer_info(self): """获取所有缓冲区的信息(用于调试)""" info = {} for stream_id in self.audio_buffers: info[stream_id] = { "buffer_size": len(self.audio_buffers[stream_id]), "recording": self.recording_state[stream_id], } return info
def main(args=None): rclpy.init(args=args)
audio_subscriber = AudioSubscriber()
try: audio_subscriber.get_logger().info("正在监听降噪音频数据,按 Ctrl+C 退出。..") rclpy.spin(audio_subscriber) except KeyboardInterrupt: audio_subscriber.get_logger().info("收到退出信号,正在关闭。..") finally: audio_subscriber.destroy_node() rclpy.shutdown()
if __name__ == "__main__": main()以上程序依赖 python 协议包 a2_aimdk 和 ros2 协议包 ros2_plugin_proto,相应的包已经放置在 AimDK 开发包的 prebuilt 目录下,python 包使用 pip install prebuilt/a2_aimdk-1.0.0-py3-none-any.whl 安装,ros2 包需要 source prebuilt/ros2_plugin_proto_aarch64/share/ros2_plugin_proto/local_setup.bash后使用。
请注意,以上程序会接收 ros2 消息,需要设置如下环境变量:
source /opt/ros/humble/setup.bashexport ROS_DOMAIN_ID=232export ROS_LOCALHOST_ONLY=0export FASTRTPS_DEFAULT_PROFILES_FILE=/agibot/software/v0/entry/bin/cfg/ros_dds_configuration.xml其中音频数据为 16kHz 采样率,16 位单声道 PCM 数据(小端序),输出的音频为纯净人声,已经过降噪处理,回声消除等,可以直接用于 ASR 识别。
ProcessedAudioOutput消息包含以下字段:
| 字段名 | 类型 | 说明 |
|---|---|---|
| header | Header | 通用消息头,包含时间戳和消息 ID |
| stream_id | uint32 | 音频流 ID(1:内置麦克风,2:外置麦克风) |
| vad_state | AudioVADState | 语音活动检测状态 |
| audio_data | bytes | 降噪处理后的 PCM 音频数据 |
AudioVADState 枚举定义:
| 枚举值 | 数值 | 说明 |
|---|---|---|
| AUDIO_VAD_STATE_NONE | 0 | 无语音 |
| AUDIO_VAD_STATE_BEGIN | 1 | 语音开始 |
| AUDIO_VAD_STATE_PROCESSING | 2 | 语音处理中 |
| AUDIO_VAD_STATE_END | 3 | 语音结束 |
注意:当前版本外置麦克风的接口输出 vad_state 存在问题,预期一条语音输入的状态为 122222222223,实际输出的状态为 0111111111112,此问题仅在外置麦场景下出现(内置麦正常),并计划在后续版本修复。当前版本建议手动对状态执行 +1 补偿。
9.2.3 扬声器音频播放
Section titled “9.2.3 扬声器音频播放”注意:机器人扬声器音量设置不得超过 70%,音量超出此范围扬声器经功放放大后会超额定工作,造成扬声器损坏
可使用下面的设备进行播放,程序调用请自行实现,音频声道、逻辑设备等配置可查看 ORIN 上 /etc/asound.conf 文件。
aplay -D multiplay_def -c 1 -r 24000 -f S16_LE /agibot/data/var/interaction/audio/wake.pcm音量调节指令如下:
- P1 机器
- 设置播放音量
amixer cset name='x Headphone Volume' 15(0~31)- 获取播放音量
amixer cget name='x Headphone Volume'- 设置静音
amixer sset 'x Headphone Left' offamixer sset 'x Headphone Right' off- 解除静音
amixer sset 'x Headphone Left' onamixer sset 'x Headphone Right' on- T3 机器
- 设置播放音量
amixer -c DefPDevice sset Speaker 80%(0~100%)- 获取播放音量
amixer -c DefPDevice sget Speaker- 设置静音
amixer -c DefPDevice set Speaker off- 解除静音
amixer -c DefPDevice set Speaker on9.2.4 人脸识别
Section titled “9.2.4 人脸识别”若 agent 设置为 voice_face 模式,除输出降噪麦克音频 Topic 接口外,同时返回人脸识别结果 Topic 接口 /agent/vision/face_id,only_voice 模式下无此消息
获取人脸识别结果示例程序如下:
#!/usr/bin/env python3
import rclpyfrom rclpy.node import Nodefrom rclpy.qos import QoSHistoryPolicy, QoSProfile, QoSReliabilityPolicyfrom ros2_plugin_proto.msg import RosMsgWrapper
from aimdk.protocol_pb2 import FaceIdResult
class FaceIdSubscriber(Node): def __init__(self): super().__init__("face_id_subscriber")
qos_profile = QoSProfile( history=QoSHistoryPolicy.KEEP_LAST, depth=10, reliability=QoSReliabilityPolicy.BEST_EFFORT, )
self.subscription = self.create_subscription( RosMsgWrapper, "/agent/vision/face_id/pb_3Aaimdk_2Eprotocol_2EFaceIdResult", self.face_id_callback, qos_profile, )
self.get_logger().info("已开始订阅 FaceID 数据...")
def face_id_callback(self, msg): try: if msg.serialization_type != "pb": self.get_logger().warn( f"收到不支持的序列化类型: {msg.serialization_type}" ) return
# 拼接 bytes raw_bytes = b"".join(msg.data)
# 解析 protobuf face_id_result = FaceIdResult() face_id_result.ParseFromString(raw_bytes)
# 日志输出 import json from google.protobuf.json_format import MessageToDict self.get_logger().info( f"FaceID 结果: {json.dumps(MessageToDict(face_id_result, preserving_proto_field_name=True), ensure_ascii=False, indent=2)}")
except Exception as e: self.get_logger().error(f"解析 FaceID 数据时出现错误: {e}")
def main(args=None): rclpy.init(args=args) node = FaceIdSubscriber()
try: node.get_logger().info("正在监听 FaceID 数据,按 Ctrl+C 退出...") rclpy.spin(node) except KeyboardInterrupt: node.get_logger().info("退出中...") finally: node.destroy_node() rclpy.shutdown()
if __name__ == "__main__": main()以上程序依赖 python 协议包 a2_aimdk 和 ros2 协议包 ros2_plugin_proto,相应的包已经放置在 AimDK 开发包的 prebuilt 目录下,python 包使用 pip install prebuilt/a2_aimdk-1.0.0-py3-none-any.whl 安装,ros2 包需要 source prebuilt/ros2_plugin_proto_aarch64/share/ros2_plugin_proto/local_setup.bash后使用。
请注意,以上程序会接收 ros2 消息,需要设置如下环境变量:
source /opt/ros/humble/setup.bashexport ROS_DOMAIN_ID=232export ROS_LOCALHOST_ONLY=0export FASTRTPS_DEFAULT_PROFILES_FILE=/agibot/software/v0/entry/bin/cfg/ros_dds_configuration.xml同时提供了本地人脸注册接口,该接口非常规 HTTP JSON RPC 或 ROS2 Topic,而是单独提供了一个调用脚本 examples/agent/run_face_id_register.sh,其内容如下:
#!/bin/bash
# 1. 要注册的 images 目录(sh脚本同级)RUN_SCRIPT_DIR="$(cd "$(dirname "${BASH_SOURCE[0]}")" && pwd)"IMAGES_DIR="${RUN_SCRIPT_DIR}/images"
# 2. Faceid base目录FACEID_SCRIPT_DIR="/agibot/software/v0/scripts/agent/face_id/"FACEID_LIB_DIR="/agibot/software/v0/bin"FACEID_OFFLINE_FEAT="/agibot/data/param/interaction/face_id/offline_face_features"
# 3. 可执行文件与配置文件的相对路径EXEC="${FACEID_SCRIPT_DIR}/face_id_register"CONF="${FACEID_SCRIPT_DIR}/face_id_config.json"
chmod +x "$EXEC"export LD_LIBRARY_PATH="${FACEID_LIB_DIR}":$LD_LIBRARY_PATH
# 4. 调用rm -rf "$FACEID_OFFLINE_FEAT"/*"$EXEC" "$CONF" "$IMAGES_DIR"将需要注册的人脸数据放置到脚本同目录下的 images 目录中,在 ORIN 上执行该脚本即可完成注册,注册完成后 ID 与图片对应关系以及是否成功注册的结果都存储在同目录下的 Result.txt 文件中,示例如下(其中模糊和人脸过小也注册成功了,但是实际使用中仍推荐使用 满足.png 中展示的清晰正面人脸图像,以免对识别率等造成不良影响):
GID17648293009168001 满足.png OK 注册成功GID17648293018063607 侧脸.png FAIL 人脸质量不满足要求GID17648293020281011 过暗.png FAIL 人脸质量不满足要求GID17648293021878934 模糊.png OK 注册成功GID17648293024764703 过曝.png FAIL 人脸质量不满足要求GID17648293026684491 无人脸.png FAIL 未检测到人脸GID17648293028768487 非人脸.png FAIL 未检测到人脸GID17648293030305970 人脸过小.png OK 注册成功人脸注册识别逻辑规则说明:
- images 目录中存放 jpg、png、jpeg类型的人脸图片,图片只存在一个正面清晰的人脸,运行脚本即可注册。注册后需要重启 agent,在 ORIN 上运行
aima em stop-app agent && aima em start-app agent即可,也可直接重启机器人。 - 本地注册的人脸特征会存放在 ORIN 上 /agibot/data/param/interaction/face_id/offline_face_features 目录下。
- 注册的用户 ID 的构建规则是:“GID” + 时间戳 + 随机4位数;发布时会将当前机器的 SN (/agibot/data/info/sn)替换 “GID” 作为新的 UID 发布
- 另外灵心平台一样可以上传人脸,我们称之为云端人脸数据库,云端人脸数据库可配置打招呼等等信息,相应内容下发后会下发后存储在 ORIN 上 /agibot/data/param/interaction/face_id/user_info.json 文件中。
- 上述脚本每次注册会将原有的本地数据库清空,请每次都完整将所有人脸数据都重新注册,即维护一个 images 文件夹,其中包含所有需要识别的人脸图像,有任何增删改需重新运行注册脚本。
- 匹配规则永远是优先匹配云端数据库然后再匹配本地数据库,找到第一个匹配成功的人脸后不会继续匹配剩余人脸。